基于CAN总线的开关磁阻电机远程控制系统的研究

0 引 言
由于应用环境的复杂,地域的广阔等不利工作条件,给开关磁阻电机的调速控制与相关参数监控带来了很多影响。因此,设计研制一种基于开关磁阻电机的远程控制系统(SRD)具有十分重要的现实意义。
Controller Area Network(简称CAN),与一般的总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性。本文主要探讨基于RS-485与CAN总线的开关磁阻电机远程监控系统的构成。SRD调速系统通常采用传统PID控制策略,系统很难保守良好性能。目前,神经网络控制与模糊控制技术应用于SRD取得了一定的成绩。
卡尔曼滤算法是一种递推算法,对于系统存在过程及测量噪声,状态变量受到污染,可以利用卡尔曼滤波技术进行处理。本文将卡尔曼滤波器与传统的PID控制相结合,使SRD控制效果得到明显改善。
1 系统设计方案
基于CAN总线的开关磁阻电机远程控制系统如图1所示。系统主要包括PC(上位机)、RS-485与CAN结合的通信网络、CAN智能节点与开关组电机四大部分。串行接口标准的选择上位机与CAN智能节点间的距离通常较远,上位机的Rs-232C接口的最大传输距离为15m,不能满足要求。而RS-485串行数据通信标准可传送1200m以上,因此宜选用后者。上位机本身具有RS-232C接口,可配备一块RS232-RS485转换板STD5630,实现RS-232电平到RS-485电平的转换。

在该远程监控系统中,采用RS-485与CAN结合通信网络,节省了CAN适配卡与专门的驱动程序,因此可靠性与性价比得到了较大的提高。
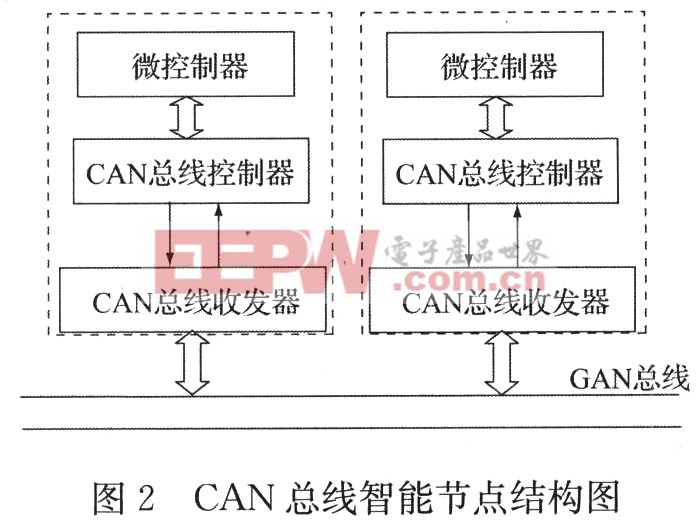
CAN总线智能节点在分布式控制系统中起着承上启下的作用。它位于执行机构所在的现场,一方面和上位机进行通信,以完成数据交换;另一方面又可根据系统的需要对现场的执行机构进行控制和数据采集。典型的CAN总线控制节点是由微处理器、CAN控制器、CAN接口构成,如图2所示。








评论