基于DSP 的新型球形机器人控制器设计

1 驱动机构简介
目前的球型机器人大都采用重力驱动,即通过某种机构改变整个系统的重心,从而使它按特定的方向运动。本文所设计的球形机器人也是依据这一原理,其结构简图如图1所示。
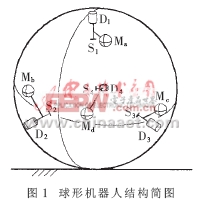
该机器人有4个电机,每个电机带着一个偏心重块,按空间对称方式安装在球壳内部,并且D1、D2、D3、D4 4个电机的回转轴分别都指向球心。每个电机都带角度传感器,用于测量电机的转角,分别如图中的S1、S2、S3、S4。当电机带动偏心重块转动至不同的位置时,整个系统的重心也会随之相应地改变。球体在新的重心作用下就会向特定的方向滚动。
2 控制系统设计
如图1的球形机器人系统控制电路的整体方案如图2所示。系统由带DSP的主控制板、采样电路、电机驱动电路、无线接收模块和无线发送模块组成。当主控制板通过无线收发模块接收到“启动”的命令字后,和采样电路、电机驱动电路协调工作,驱动系统重心至指定位置。

2.1 主控制板简介
为了保证控制电路的可靠性,加快系统的开发进度,系统采用上海迅特电子有限公司的目标板IMEZ2407作为主控制板。该板是一个DSP的最小系统,其结构简图如图3所示。
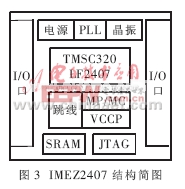
从图3可以看出,IMEZ2407主要解决TMS320LF2407的周边必备电路,如电源模块、晶振和PLL振荡电路、编程电源VCCP(接+5V或地)运行模式MP/MC选择的跳线、JTAG接口等。另外板上还带有1片64KB的SRAM,用作调试时的程序运行空间。调试完成后,再将程序烧入DSP的Flash程序存储器中。
2.2 采样电路
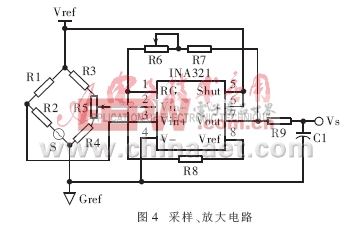
采样电路用来采集电机的转角信息。这里,角度传感器用无限旋转式的滑动变阻器。电位测量采用电阻桥方式。信号放大采用TI公司的INA321仪器放大器。采样、放大电路如图4所示。图中,R1~R4取大电阻以降低测量电路的功耗,R5可以调节电阻桥使它达到平衡,R6用来微调放大器的放大倍数,S为角度传感器。根据INA321的数据资料,放大电路的放大倍数计算公式如下:
A=5+5×(R6+R7)/R8
2.3 电机驱动电路
系统所使用的电机为普通的直流电机,并带有减速器。电机参数为:额定电压:5V。额定电流:80mA。额定转速:60r/min。
基于以上参数,作者选择了LG9110作为电机的驱动芯片。电机驱动电路如图5所示。
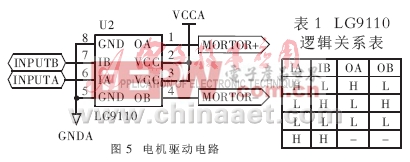
图中INPUTA和INPUTB接到DSP的2个PWM输出口上。MORTOR+和MORTOR-接直流电机的二端。LG9110的逻辑关系如表1所示。当IA和IB分别为高电平和低电平时,电机就会转动,而欲使电机换向,可以通过同时翻转IA和IB的电平值来实现。当IA和IB同时为低电平时,电机二端电压都为低电平,电机不工作。

pid控制器相关文章:pid控制器原理










评论