一种无超调钝角拐点的PlD温控设计

摘要:为解决某特种金属热处理的温控工艺要求,通过采用工控机组态、PLC控制、特殊的PID调节方法,根据不同的温升阶段,使系统自适应调节PID参数并实时变更温控功率的输出比率,有效地克服了传统PID控制器在温控过程中,因温控惰性而出现的超调现象,系统可完全依照用户设定的温控工艺曲线运行,并全程实时控制、记录加温过程,严格执行计划曲线,尤其在变温点的控制方面实现了既无欠温又无超调钝角拐点的控制效果。通过对实际产品的金相组织检测,彻底消除了以往由于过温超调而造成的废品现象。
关键词:金属热处理;金相组织;PLC温控;工控组态;PID控制器
随着当今工业生产的不断发展,在特种金属热处理的工艺要求中,具有超调响应的PID(Proportional Integral Derivative)温控系统已不能满足特殊生产的需求,它不仅需要在加热过程中严格执行预定的温升曲线,而且尤其注重温度拐点的工艺控制,必须做到既无欠温而又无过温的控制效果。欠温时达不到预定的工艺要求,而过温可能会造成加热工件的晶粒组织形成永久性的破坏而导致产生废品。在金属加热温度控制系统中,由于加热源与被加热对象之间控制惰性的客观存在,在系统噪声、负载扰动等时变不确定性的影响下,若要求加热工艺过程实时准确执行预定温度曲线,采用典型的PID控制思路是难以实现的。在以往的生产过程中,为防止超调过烧,在温度的拐点处是以欠温状态为代价运行的,为追求产品的高质量水平,经反复探索、研究、实践,在应用Siemens Smatic S7-200 PLC的PID指令的基础上,通过实践新型PID自适应控制理论,对不同温度段PID各参数的适时变更、调节,突破了欠温与超调相互制约的矛盾,达到了与系统预定的升温曲线相一致的控制结果。
1 系统组成简介
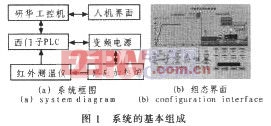
系统设备的基本组成如图l(a)所示,具体控制过程为:在工控机组态软件的支持下,通过人机界面的交互输入或修改预定的工件加热温升曲线,系统的人机界面如图l(b)所示,生产过程的操作均通过人机界面上相应指示实施。设备运行后,PLC将依照组态预定的温升曲线,对变频电源的功率输出进行实时PID调节,从而控制感应加热设备对工件加热,工件的实时温度则又由红外测温仪采样后反馈至PLC形成温度闭环。系统运行过程的实时数据及现场设备的运行状态信息,均由相应的传感器件传送到PLC和工控机实施数据采集记录、报警提示等智能化控制,所有操作均可通过人机界面实现。
2 无超调PID温控设计
2.1 SIEMENS PLC中PID指令算法
在西门子PLC中,由于其PID算法是一种经典的PID算法,原理上与自动化仪表的控制思想是一致的。其PID控制结构如图2所示,输入输出关系为:
图2中,Sv(t)是输入量(给定值),Pv(t)是反馈量,C(t)为输出量。偏差值ev(t)=Sv(t)-Pv(t);mv(t)是PID调节器的输出信号。Kp是调节器的比例系数,Mintial是PID回路输出的初始值,PLC可编程控制器在对被控量PID调节时将PID公式离散化后,在系统的采样周期为Ts时,用矩形积分近似精确积分;用差分近似精确微分,将PID公式离散化,则第n次采样时控制器的输出为:










评论