基于模糊PID的全方位移动机器人运动控制
2.4 输出量解模糊
依据速度模糊控制参数整定规则确定出输出量后,得到的只是一个模糊集合,在实际应用中,必须用一个精确量控制被控对象,在模糊集合中,取一个最能代表这个模糊集合的单值过程称为解模糊裁决。常用的解模糊算法有最大隶属度法、加权平均法等,根据实际情况,采用加权平均法进行解模糊。此时,模糊控制器输出可表示为

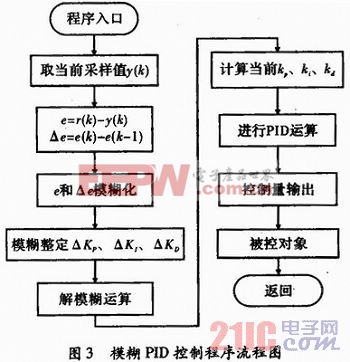
最后,根据式(3)可得到最终的PID控制器参数。模糊PID控制程序流程如图3所示。本文引用地址:http://www.eepw.com.cn/article/161320.htm
3 实验结果
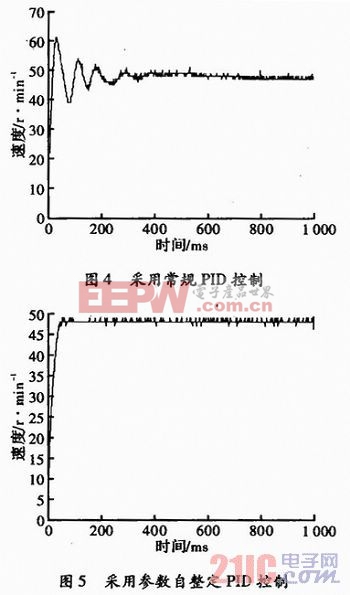
为验证参数模糊自整定PID控制器的有效性,文中对直流电机分别做了常规PID控制和模糊PID控制实验。实验中给定轮速为50 r/min,图4为采用常规PID控制方法控制的电机转速,图5为采用模糊PID控制方法控制的电机转速。相比常规PID控制算法,采用参数模糊自整定PID算法能够明显降低超调量,加快响应速度,改善控制系统对轮速的控制效果。
4 结束语
机器人运动控制系统是整个Robocup机器人系统的执行机构,在场上的表现直接影响了整个足球机器人系统。文中以足球机器人为平台,考虑到系统的时滞性和非线性,采用模糊控制与PID控制相结合的方式,并在自行研制的足球机器人上进行了速度控制的实验研究。结果表明,该方法弥补了常规PID控制应用在机器人运动速度控制时超调量大,响应时间长的缺点,可以取得理想的效果。

伺服电机相关文章:伺服电机工作原理











评论