磁阻传感器在机器人玩具中的应用

0 背景
本文引用地址:https://www.eepw.com.cn/article/159648.htm机器人玩具控制系统的设计中对方向的控制尤其重要,直接体现了机器人玩具的控制精度和整体效果。在本文中要解决的问题就是控制好机器人的运动方向和球门之间的夹角,让其能够在运行中实时地自我调整,准确地把球送入球门。
本文的课题背景是一个机器人玩具的控制系统设计,主芯片采用的是以摩特罗拉公司的MC86EZ328芯片,只完成与通信、运算等有关的主要操作,在没有操作时,由运行于其上的操作系统uClinux来维护。对于所有与EZ328的核心运算、控制、通信、操作无关的外围设备的维护和控制都通过一块AT89C52来完成,它与EZ328的底层通信协议为同步串口协议(SPI),在AT89C52中由软件来实现。C52包含的部件主要是A/D转换器,键盘接口,电机驱动模块。硬件结构电路图如下图1:
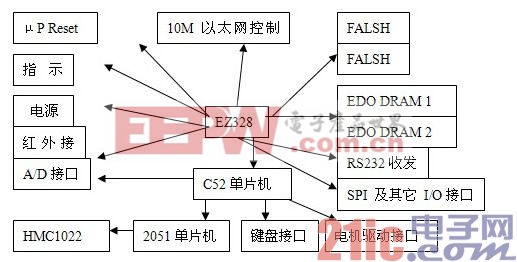
图1
机器人玩具的方向控制的核心部件就是HMC1022两维磁阻微电路芯片,它的机构是四臂的惠斯通电桥,将磁场转化为差动输出的电压,可以检测低至85微高斯的磁场信号,这种低成本的传感器相比传统型号的同类产品具有更小的体积和更低的功耗。供电电源为3V-10V直流电压。本设计中采用的HMC0122采用的是16脚SOIC封装,集成了两路的惠斯通电桥,测出平面的X轴和Y轴的磁场信号,这样就可以获得水平面上方向的完整信号。
比较特殊的是Honeywell公司的这种磁阻传感器带有一个获得专利的置位/复位电路。
图2和图3分别是HMC1022内部电桥和置位/复位电路电路设计。
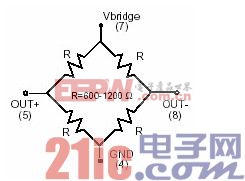
图2
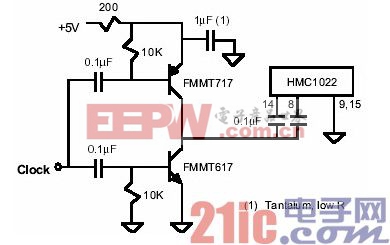
图3











评论