一种脉冲激光功率采集和控制系统的设计

3.2 PID算法程序设计
3.2.1 PID算法原理
PID算法是过程控制系统中应用最广泛的一种控制方法,数字式PID控制就是将模拟PID控制离散化。数字式PID系统框图如图6所示。本文引用地址:https://www.eepw.com.cn/article/159633.htm
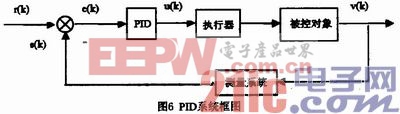
数字式PID控制是一种采样控制,需根据采样时刻的偏差量计算输出控制量,e(k)=s(k)-r(k)。然后经过对偏差e(k)进行比例、积分、微分,可到控制量。
3.2.2 PID参数特性
P(比例):比例系数加大,系统的动作灵敏,速度加快,稳态误差减小,但如果比例系数偏大的话又会导致振荡次数加多,调节时间加长。
I(积分):积分会使系统的稳定性下降,但能消除稳态误差,提高系统的控制精度。
D(微分):微分作用可以改善动态特性,微分系数偏大,超调量较大,调节时间较长,微分系数偏小时,超调量也会变大,调节时间变长。所以只有微分系数合适时才能使超调量较小,减短调节时间。
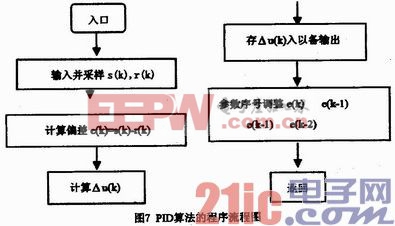
3.2.3 增量PID控制算法和程序流程

式中u(k)为第k次采样时刻输出,△u(k)为第k次采样时的输出增量,在计算控制中,通过参数整定,参数都可以求出,所以实际控制中只需要求出e(k),e(k-1),e(k-2)三个有限偏差值就可以求出控制增量。图7为其流程图。
3.2.4 PID参数的确定
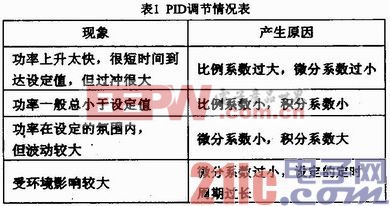
PID控制最困难的部分是比例、积分、微分三个参数的设置与调整。编程时只是设定大概的数值,然后通过PID参数特性进行反复的现场调试,最终找到相对理想的参数值。通过PID参数特性可以得到不同效果PID参数调节的情况。表1和表2分别为调节情况表和测试数据表。

3.3 测试数据分析
通过数据分析可得,功率一般保持在0.2W以内。稳定性满足要求。最终实现了功率的稳恒输出。
4 小结
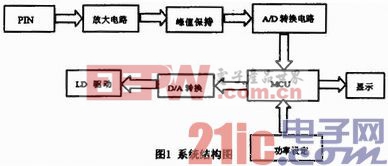
本设计对脉冲激光功率的采集及处理做了较为详细的介绍,主要从软件和硬件两个方面给予了说明。最终实现了脉冲光功率的稳定输出,为脉冲激光器控制系统的设计做了充分的准备,实验结果较为理想。本设计也可用在其他脉冲信号的处理方面。


评论