基于模糊控制的电磁智能车设计

摘要:智能车控制是涵盖自动控制、模式识别、传感技术、计算机、机械与汽车等多个学科的复杂系统。为了实现对其很好的控制,文章提出了基于模糊控制的电磁引导的智能车控制方案。实际结果表明智能车运行性能优良。
关键词:智能车控制;模糊控制;电磁传感器
0 引言
智能车涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多个学科专业,十分复杂。传统的控制理论对于复杂或难以精确描述的系统,则显得无能为力了。模糊控制是利用模糊数学,可以有效地利用专家知识,适用于许多复杂系统。因此提出了基于模糊控制的电磁智能车设计。
1 系统总体方案及车模各项参数
1.1 系统总体方案
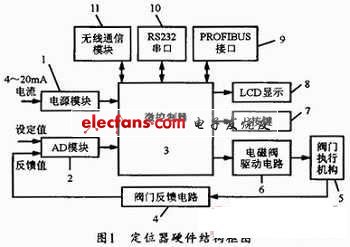
智能车系统由车前桥的电磁传感器单元、舵机单元、转向机构,负责路径检测以及转向工作。后桥的光电编码器、电机、制动装置以及Freescale的MC9S12XS128主控单元构成,负责电机速度控制,主控单元负责赛道数据处理以及控制策略的实施。此外增加无线单元对智能车的实时数据进行监控,以对模糊控制规则进行优化。智能车系统结构关系如图1所示:
1.2 系统的硬件参数
智能车外形参数:车长39cm,车宽17cm,车高13cm,车重约1.0kg。
2 硬件电路设计
2.1 主控单元的设计
主控单元采用Freescale MC9S12XS128,主频40MHz,FlashRom128kB,具备SPI、SCI、IIC等常用接口。
2.2 光电编码器的选取与安装
旋转编码器,线数越高,测速精度就越高,但是体积就越大,最终选用了200线的编码器E6A2-CS3E。将编码器安装在后轮传动齿轮上既可以保证其运转的稳定性,又降低了整车的重心,其具体安装如图3所示。




评论