恒流多通道动物机器人遥控刺激系统的研制

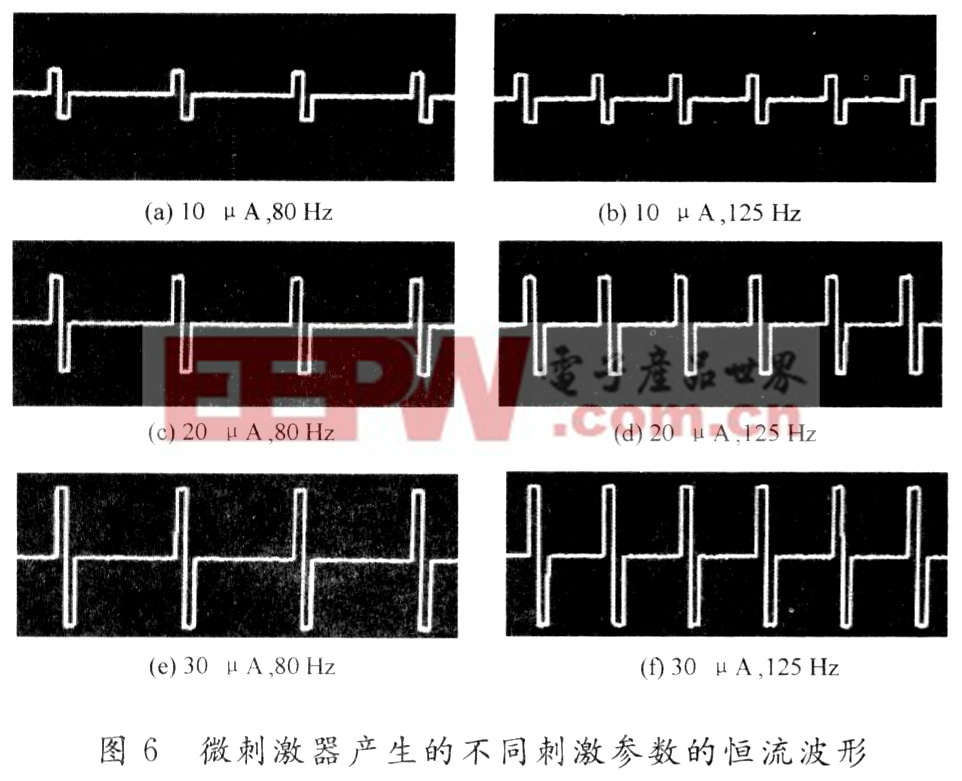
在大壁虎运动的人工诱导实验中,该设备对于敏感度居中以及中偏高的脑核团刺激表现的性能较好,能够满足对大壁虎运动脑核团刺激的强度,实现了控制壁虎运动行为的目标。但是,有些脑核团对电刺激不够敏感,或者是脑电极植入位置与脑核团实际位置偏差较大,其要求的刺激强度太大(40μA以上),这时大壁虎对电刺激的反应就不够明显。背负式微刺激器不能达到很高的刺激强度,是该设备的不足之处,但是,它对大壁虎基本运动(例如左转、右转、前进、躲避)的诱导已经能够满足要求。微刺激器产生不同刺激参数的恒流脉冲(100 kΩ负载端电压波形)如图6所示。
3 结 语
动物机器人遥控刺激系统,在动物机器人的研制中具有重要的意义。它的研制不但涉及电路设计,程序设计和无线通信方面的知识,还与生命科学有着密切的联系。在多学科科研人员的共同努力下,研制的背负式微刺激器能够实现多通道双相恒流脉冲刺激,并且每个通道的刺激强度可以灵活调节。此外,它还具有多点位联合刺激和延时刺激的功能。其尺寸小,重量轻,耗能低,无线通信距离远,适合于小型动物的在体刺激试验。








评论