消防机器人GPS导航系统的精度提高方案

引言
本文引用地址:https://www.eepw.com.cn/article/152527.htm 消防侦察机器人是一类实用型机器人,它能替代消防救援人员遥控进入易燃、易爆、有毒、有害、易坍塌建筑物、大型仓库堆垛、缺氧、浓烟等室内外危险灾害现场,进行现场探测、侦察。由于火灾现场的特殊环境(建筑物遮挡,浓烟,火焰等),控制人员必须能够在视野之外准确地操控消防机器人,因而必须采用可靠精确的导航系统。一般消防机器人都载有摄像头,可以通过电缆或无线传输模块将视频信号返回给控制人员,由此可以实现机器人的视觉导航。然而视频信息的带宽需求比较大,而且易受外部环境干扰,在许多场合无法使用。本文提出一种融合GPS,陀螺仪和里程计等传感器信息的综合导航系统方案,系统结构如图一所示。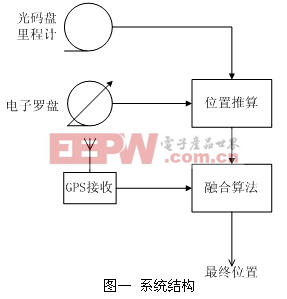
GPS全球卫星定位系统是随着现代航天及无线电通讯科学技术的发展建立起来的一个高精度、全天候和全球性的无线电导航电位、定时的多功能系统。GPS可提供实时的三维坐标、三维速度和高精度的时间信息,目前已成为当今世界上应用最广泛、最实用的全球精密授时、测距、导航、指挥、调度系统。
GPS模块可提供定位时间,经纬度,定位功能指示等12项数据,输出格式采用标准NMEA协议,可以直接使用获得的经纬度数据作为方位信息(东经XXX.XXXX,北纬XXX.XXXX)。也可以根据功能指数和精度因子计算相对于出发点的位置信息(北:±XXXX.XXm;东:±XXXX.XXm)。模块单机定位时精度为10~30米,如果使用了基准站差分定位技术则精度可以提高至5~10米[1]。这样的精度仍然无法满足消防机器人准确操控的需求,另一方面,消防侦察机器人需要在工厂区,室内等无法接收到GPS卫星信号的环境下工作,因此必须用其他技术作为GPS定位的补充。
电子罗盘系统
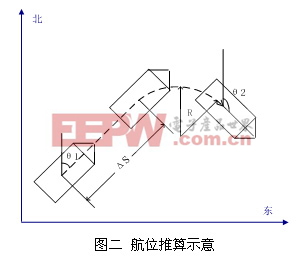
电子罗盘COMPASS的操作原理是根据磁阻感应地球磁场变化而即时输出物体的运行方向和运动姿态数据。运动方向数据包括方位角(顺时针偏离正北方向的角度)等数据;运动姿态数据包括俯仰角、旋转角等数据。COMPASS的使用目的是针对GPS接收数据的补偿,使得本系统在GPS卫星信号接收不理想的情况下,依旧能产生恒定频率的机器人运行方向和姿态信息,并进一步根据相应算法得出其位置信息。








评论