基于嵌入式Linux操作系统的可视化安全倒车系统

引言
本文引用地址:https://www.eepw.com.cn/article/151387.htm电子信息与数字图像处理技术目前已被广泛地应用在各个领域,车载系统的信息化已成为现代汽车业的重要标志。现在的倒车雷达系统可以为驾驶者提供许多帮助,多数采用超声波测距技术,可以直接显示出车尾与障碍物之间的距离。但由于超声波的散射特性,如果地面有尖锐的突起或存在横在半空的棱角状物体,系统就不能有效地“察觉”。假如能为现有的倒车系统增加一个可视功能,那么驾驶员在倒车时不必回头就可清楚车后的情况。本文设计了一种可视化安全倒车系统,该系统采用嵌入式Linux操作系统内核驱动 USB摄像头实现车后状况实时监控,通过判断超声波测距是否达到阈值来启动语音报警功能。
1 系统方案设计
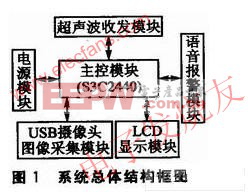
如图1所示,系统由主控模块、超声波收发模块、USB摄像头图像采集模块、语音报警模块与LCD显示模块等。主控模块采用三星公司基于ARM9内核的S3C2440微处理器,主频最高可达533 MHz,处理速度快。采用软件编程技术实现对其外围电路的控制,并提供外围电路所需的各种信号,简化了外围电路的设计难度。
2 系统硬件设计
2.1 主控模块
以S3C2440为核心的的组成如图2所示。

2.2 超声波发射电路
超声波发射电路原理图如图3所示。发射电路主要由反相器74LS04和超声波发射换能器T1构成,使用CPU内部的PWM定时计数器输出的40 kHz方波信号。
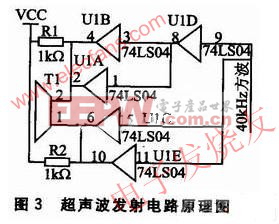
一路经一级反相器(U1C与U1E并联组成一级)后送到超声波换能器的一个电极(T1的1脚);另一路经两级反相器(U1D为第一级,U1B和 U1A组成第二级)后送到超声波换能器的另一个电极( T1的2脚 )。用这种推换形式将方波信号加到超声波换能器的两端,可以提高超声波的发射强度。输出端采两个反相器并联,以提高驱动能力。上位电阻R1、R2一方面可以提高反相器74LS04输出高电平的驱动能力,另一方面可以增强超声波换能器的阻尼效果。
2.3 超声波接收电路
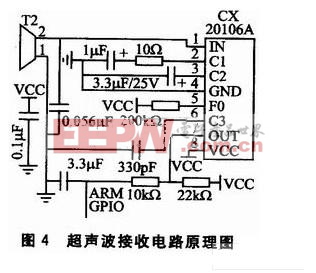
超声波接收电路原理图如图4所示。CX20106A是一款红外线检波接收的专用芯片,常用于电视机红外遥控接收器。其优点是简单易用,电路连接简单,且减少了生产调试的麻烦。当CX20106A接收到40 kHz的信号时,会在第7脚产生一个低电平下降脉冲,这个信号可以接到ARM的外部中断引脚作为中断信号输入。
2.4 USB摄像头图像采集模块
采用中星微电子ZC0301芯片组的USB数字摄像头。与模拟摄像头相比,其优势在于:CMOS图像传感器能直接产生图像原始数据;硬件支持标准的JPEG压缩;具有主流高速的USB总线设备接口等。对摄像头而言,USB总线的上的信息传输类型通常采用的是实时传输。USB设备端提供若干通信端口,主机与端口间建立起逻辑上的通信管道,进行数据传输。在摄像头的设备初始化阶段,主机与0号端口通信,驱动程序检测摄像头型号和所有端口信息。进入数据传输阶段,主机与探测到的实时输入端口建立通信管道,实时回传摄像头拍摄到的图像数据。
linux操作系统文章专题:linux操作系统详解(linux不再难懂)






评论