基于CAN总线的嵌入式车灯监控系统设计

摘要:为了确保车灯的质量可靠性,提出了一种嵌入式车灯控制及电气参数检测系统的设计方案。系统包括上位机监控终端和下位机控制节点,监控终端负责设置各车灯的工作参数和显示车灯的工作状态;控制节点采用基于Cortex—M3内核的嵌入式微处理器LM3S2965为核心,将实时操作系统μCOS-II植入其中,提高系统的实时性和稳定性,同时将我国自主研发的iCAN协议应用到系统中,从而实现对车灯的网络化监控。结果表明,系统最多可对63个车灯进行实时的电气参数检测与控制,具有较高的可靠性。
关键词:车灯监控系统;μCOS-II;iCAN协议;LM3S2965
当前我国的汽车总数呈现爆发式增长,由于汽车照明与交通安全有着密不可分的关系,因此对车灯产品进行可靠性检测是很有必要的。针对这种情况,提出了基于CAN总线的嵌入式车灯监控系统的设计思想,结合总线技术和单片机嵌入式技术,实现对车灯进行功能控制以及电压电流参数检测。其中,iCAN协议在CAN总线网络中的使用,可以实现对多个车灯同时进行网络化监控,进而可以实时准确地掌握各个车灯的工作情况,确保车灯产品的质量可靠性。
1 系统整体结构
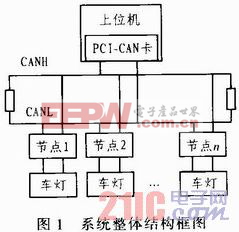
系统主要由上位机和多个下位机节点组成。上位机是由VC编成的监测软件,PC机通过PCI-CAN卡与CAN总线相连,完成与下位机节点的通信,显示各车灯的电流电压及工作情况,并完成功能的设置。下位机节点以LM3S2965为主体,采样车灯工作时的电压电流,并对车灯进行控制。系统整体结构框图如图1所示。
2 节点的硬件设计
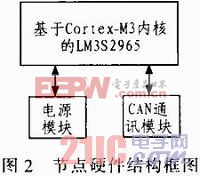
下位机节点的硬件结构设计框图如图2所示。节点主要完成以下工作:1)定期对车灯工作时的电压电流进行AD采样,并将结果发送到CAN总线上,供上位机接收;2)接收上位机发送到CAN总线上的命令,并控制车灯实现相应的功能。因此,节点主要包括微处理器部分、CAN通讯模块、电源模块。
2.1 微处理器选型
为了确保系统对车灯进行实时、可靠地控制及检测,这里选用可植入实时操作系统的Cortex-M3内核芯片LM3S2965。LM3S2965是南TI公司Stellaris所提供的首款基于ARM Cortex-M3的控制器对CAN总线应用方案而设计的芯片,具有较高的代码密度和指令执行效率。片内有256 kB的单周期访问的Flash,64KB的单周期SRAM,为操作系统的植入和运行提供了足够的容量;内部集成了兼容CAN2.0A/B的CAN控制器和ADC模数转换器,可以简化节点中CAN通讯电路和AD采样的电路的设计,同时也降低了软件开发的难度。







评论