小型倾转旋翼机的无刷直流电机驱动器设计

微控制器的选择
本文引用地址:https://www.eepw.com.cn/article/145573.htm本设计中微控制器采用的是ADI公司生产的ADuC7060单片机。ADuC7060采用ARM7TDMI内核,其内部集成了一个三相PWM接口,16个通用I/O端口,两个独立的多通道24位Σ-ΔADC,以及通用定时器和I2C串行接口等资源,性能十分优越。当工作在10.24 MHz时,其功耗一般仅为25 mW,满足模型机系统对低功耗的要求。
三相桥式驱动电路
在本系统中,逆变电路为三相桥式结构,采用上桥臂单边PWM控制。如图4所示,图中V1~V6为功率MOSFET,上桥臂选用型号为IRFR5305的P沟道功率MOSFET,当PWM输出高电平时导通;下桥臂选用型号为IRFR1205的N沟道功率MOSFET,当I/O端口输出低电平时导通。在每个功率MOSFET的前端都放置了一个三极管,目的是提高微控制器端口的驱动能力,保证MOSFET的可靠开关。在一个电周期内,控制导通相序为AB→AC→BC→BA→CA→CB,即可使电机连续旋转。
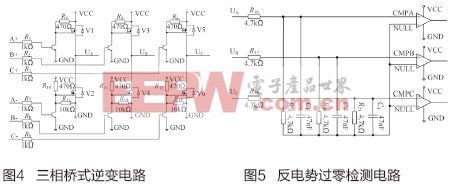
反电势过零检测电路
反电势检测电路如图5所示,UA、 UB和 UC与电机绕组引出端连接,经过分压网络后得到分压点CMPA、CMPB和 CMPC,图中电容起滤波作用。同时图中电阻构成了一个星型网络,电路中NULL点可以用来虚拟中性点。这样只要利用比较器成对比较分压点与虚拟中性点电压,即可检测反电势信号的过零点。
无刷直流电机驱动系统软件设计
无刷直流电机驱动系统软件流程如图6所示,主要分为起动和调速两部分。由于电机转速与螺旋桨升力之间难以建立精确关系[5],所以设计中不对电机本身单独进行闭环控制,而是根据陀螺仪提供的反馈信号,对旋翼机整体进行闭环控制。当旋翼机控制器发出速度信号后,由ADuC7060微控制器I2C总线接收。如果速度信号从零开始增大,则需要进行起动,否则跳过起动程序,直接根据速度信号改变PWM的占空比,调节螺旋桨的转速。

无刷直流电机的起动
反电势信号在电机静止或低速时难以检测,因而电机起动时无法利用反电势信号自主换相。本文采用“三段式起动”法进行起动设计,它分为预定位、外同步加速、运行状态切换三个阶段[6]。首先给任意两相绕组通电一段时间,使转子定位到已知的位置,然后利用微控制器产生频率逐渐提高的驱动信号,使电机以类似步进电机的方式加速,待转速达到可以产生清晰的反电势信号后再切换到自同步运行状态。
“三段式起动”法的关键是保证外同步加速和切换时不产生失步。针对外同步加速过程,通常采用升压升频加速或恒压升频加速方式。升压升频方式需兼顾PWM占空比及换相时间间隔与换相次数的关系,对于螺旋桨这类变转矩负载较难进行优化设计。本文采用恒压升频方式设计了一种针对螺旋桨负载的加速曲线。考虑到对于电机系统有:
![]()
式中J是系统的转动惯量;θ为转子转过的电角度;Tem为电磁转矩(与电枢电流成正比);T0为空载阻转矩;TL为负载转矩。在加速阶段,一方面由于螺旋桨负载转矩TL随转速升高而增加;另一方面随着转速增加反电势也增加,导致电枢电流降低引起Tem减小,所以加速过程中应保证角加速度减小,才能使式(1)平衡。本设计中,结合实验调试,利用MATLAB拟合了一条幂函数加速曲线,如图7所示,其中横轴代表换相次数N(由于每次换相转过60°电角度,故N正比于θ),纵轴为换相时间间隔![]() 。
。












评论