基于LabVIEW和PXI平台的6-DOF并联机器人控制系统的开发
研究背景:
本文引用地址:http://www.eepw.com.cn/article/108857.htm并联机器人以其卓越的性能正在走出实验室,步入工业界和人们最为熟悉的日常生活中。早在1962年Gough and Whitehall就把并联机器人作为轮胎检测机。最近几十年中,并联机器人被用于飞行器模拟器、微操作机器人、手术机器人以及大型射电望远镜中的例子举不胜举。然而,此类并联机器人大多存在开发周期长、系统不开放维护和升级困难、造价高昂以及系统特性不完善等缺点,这也是制约并联机器人全面走向市场的瓶颈。如何在较短的时间内开发出系统特性好、成本低、功能齐全、界面友好的多自由度并联机器人控制系统是一项挑战性的工作。
本文以6-PPPS并联机器人为控制对象,以NI公司的系列软硬件产品为基础,依托国家自然基金(No. 30770538)的支持,快速开发了此并联机器人的开放式数字控制系统。
系统总体的设计
本课题所研究的并联机器人的驱动由六个高精度的伺服电机及其驱动器承担,每一轴上都设有前限位、后限位及原点三个开关,共18个I/O量。电机驱动需要进行以位置反解为基础的轨迹规划,使机器人的末端执行器以一定的轨迹准确到达预定位置,并根据预先规划的轨迹进行工作,因此,并联机器人的轨迹规划和反解运算需要一个性能强大的计算器进行计算和存储,并且这些存储的数据实时地传送到作为下位机的控制卡和驱动器上,以产生用于驱动电机的电流或电压。考虑到系统需要大量的数据传递、精确同步以及I/O信号种类多的特点,我们首先选择了PXI开发平台,这是因为PXI不仅具有业内最高的总线带宽和最低的传输延迟,而且提供从DC到6.6 GHz RF的各种模块化的I/O。为了适应本系统进一步升级和后续模块的嵌入,我们选择了高性能的8槽机箱。控制器则采用内嵌2.2GHz Intel 奔腾4处理器的PXI-8186以满足机器人轨迹规划反解和数据分析的快速性。PXI-6511工业数字I/O接口板作为外围模块提供多达64路的隔离数字输入。至于机器人控制系统的软硬件具体设计和选型,我们将分别在下面逐一介绍。控制系统硬件之间的关系如图1.
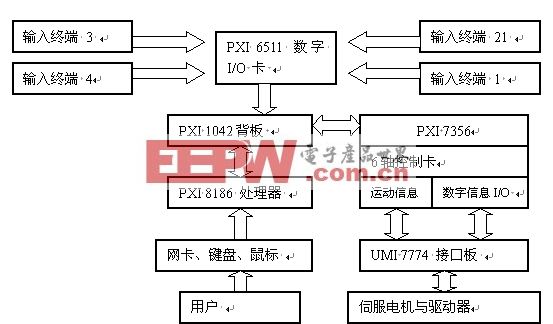
图1.6-DOF并联机器人控制系统的各部分之间的关系
控制系统硬件设计
由于本并联机器人作为染色体切割装备系统的宏动子系统,肩负着除染色体最终切割以外的绝大部分任务,具有高的定位精度和大的工作空间要求。其基本机构是一6-PPPS解耦的空间六自由度并联机构,由六个高精度伺服电机驱动实现空间六维运动(X、Y、Z三个方向的移动和绕X、Y、Z三个方向的转动),因为末端平台要达到微米级精度和六个电机的协调控制,所以我们选用了NI公司性能卓越的PXI-7356多轴运动控制卡。此多轴运动控制卡的缓存断点技术有效的提高了积分速度,对于一般的位置断点能够以2kHz的速率计算触发点,对于等距分布点则能够以高达4MHz的速率计算;此卡的两轴PID控制周期可以达到62.5μs,8轴PID控制周期可以达到250μs,实时性远远高于一般试验控制1ms的要求,如此高的计算效率适应了本系统的快速响应的特性。PXI-7356多轴运动控制卡的多轴同步时间小于一个采样周期;其位置精度较高,位置反馈时位置误差不超过正负一个正交码盘计数(quadrature count),模拟量反馈时应用其内置的8路16位模拟量输入采集功能,极大的提高了模数转换的分辨率,使其位置误差不超过一个最低有效位(LSB),如此高的精度为系统高精度的要求提供了很好的保障。另外,PXI-7356多轴运动控制卡自身的安全标准、S曲线调节功能、双PID控制环以及多轴之间的电子齿轮配合能够为系统提供可靠的稳定性。PXI-7356多轴运动控制卡及其配套的运动控制接口UMI-7774端口板具有用来控制固态继电器和读取数字编/译码器的64位数字I/O,使得系统中诸如18路限位、12路使能及众多的报警等信号读取和输出更为方便快捷。鉴于以上考虑,我们认为NI公司的PXI-7356多轴运动控制卡及其配套模块式适合本系统的要求,并选用。












评论