基于磁场检测的寻线小车传感器布局研究
位置解算算法
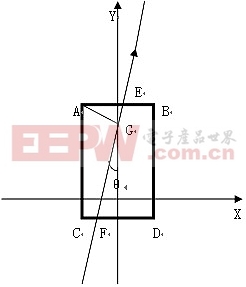
本文引用地址:http://www.eepw.com.cn/article/101038.htm位置解算就是要通过传感器检测数值确定当前道路的类型和位置。道路位置通常在小车坐标系中描述,如图5所示,ABCD代表车体,XY是车体坐标系,如果传感器安放在四个角上,位置解算就是要通过四个角上线圈的感应电压,确定载流导线与AB、CD的交点E、F的坐标,并推断道路(载流导线)的形状。
基于双垂直线圈的位置解算
垂直线圈中感应电动势的变化特征使得它适合用来解算具体的位置参数。B'X是偶函数,一个线圈的数值无法确定正负(导线左边还是右边),因此考虑两边对称地各放一个,如图5中的A、B点各放一个。
首先考虑直线情况。记AE的长度为lA,BE的长度为lB,由(5)(6)式及电磁学知识易得,A、B两处垂直线圈中感应电压的有效值为:
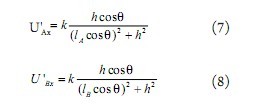
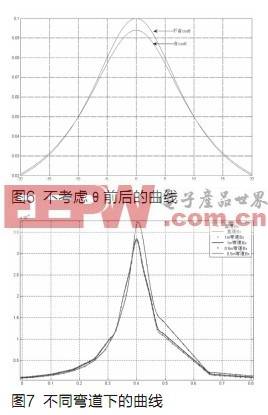
其中k是一个比例常数,与电磁环境和具体的电磁线圈有关,可以由实验确定,q是导线与小车坐标系Y轴的夹角,如图5。显然,用(7)(8)式来求解lA和lB不是件简单的事情,最好能将cosq去掉。图6显示了当q=20o,h=10,k=1时,去掉cosq前后U'Ax的曲线。此时,偏角q只在lA取值较小时才有一定的影响,同时当q更小时,这种影响会更加有限,因此,在近似分析中,可以将cosq去掉。为了分析方便,将(7)(8)式简化为:
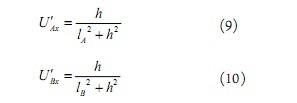
U'Ax、U'Bx在在物理上分别是A、B点的垂直传感器感应电压的有效值除以(7)(8)式中的比例常数k,因此是解算算法中的已知数据。从(9)(10)式解算lA、lB就比较简单了,以下给出两个算法:
(1)由于两个传感器之间的距离是固定已知的,可以设
![]()
上式和(9)(10)联立,解得:
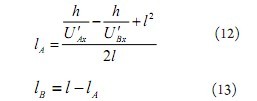
注意,lB、lA取负值是有意义的,表示导线在线段AB之外了。










评论