缩短40%迁移周期:如何构建具身智能高可靠验证底座?

尊敬的研发工程师:
在具身智能的研发进程中,您是否也正面临以下挑战?
物理样机调试风险高:极端动作测试易导致硬件损坏,每次“炸机”都意味着高昂的维修成本与研发进度延误。
算法迭代周期长:强化学习训练依赖海量试错,在真实硬件上直接训练面临机械磨损与维护费用的双重压力。
Sim-to-Real 迁移难:仿真环境与真实物理差异过大,导致策略迁移后表现大幅下降。
或许,CoppeliaSim能够帮你解决上述难题!一款基于分布式控制架构的多功能机器人仿真平台,能在虚拟空间中完成具身智能体的全流程验证,帮助您将研发风险前置、成本大幅降低。
一、为什么考虑CoppeliaSim?
CoppeliaSim提供高保真的虚拟验证环境,帮助您在零硬件损耗下完成算法验证与物理交互测试,显著缩短Sim-to-Real的迁移周期,是具身智能研发的“加速器”。
1.1的真实物理交互
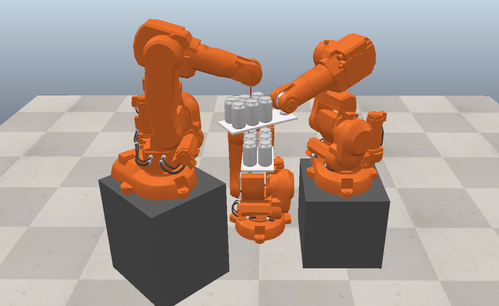
内置MuJoCo、Bullet、ODE等5款主流物理引擎
精准模拟碰撞、抓取、软体交互、绳索布料等复杂场景
为Sim-to-Real提供坚实的底层物理支撑
1.2专为算法训练与“脑干协同”设计
合成数据工厂可自动生成深度、语义、力觉等标注数据
支持正逆运动学求解,适配分支、闭环、冗余自由度等复杂机构
集成OMPL库,可实现灵活高效的路径与运动规划
1.3无缝对接主流开发生态
支持Python、Lua、C++、MATLAB等7种语言接口
原生兼容ROS/ROS2,现有算法与通信机制平滑迁移
适配人形、机械臂等各类具身智能体模型开发
1.4长效研发资产构建
通过边界测试与风险规避,模拟极端工况及硬件失效场景
实现策略训练成本集约,高频训练免去真实硬件磨损
缩短虚实迁移周期,预部署调优可有效降低迁移难度
二、典型应用场景
以下场景正是研发中最容易反复“掉坑”的环节——CoppeliaSim能在以下场景中帮助团队提前排雷。
2.1人形/机械臂等本体构型快速迭代
修改关节自由度、传感器布局后即时验证效果,减少物理样机改版次数。
2.2复杂任务策略部署
在虚拟家庭、仓库等非结构化场景中直观评估作业效能,跨环境切换测试算法鲁棒性。

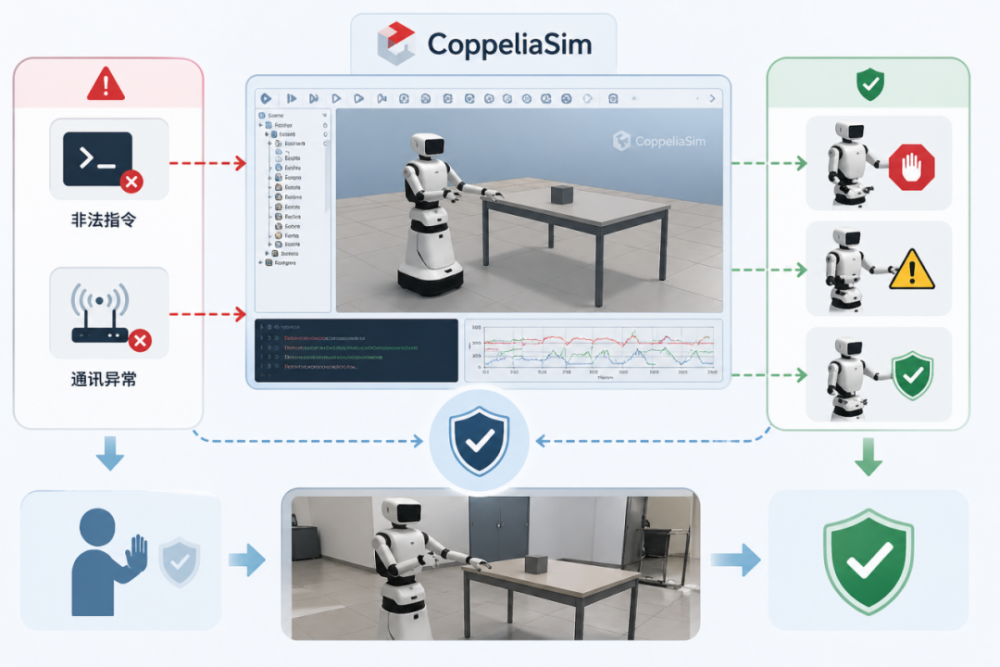
2.3安全机制验证
模拟非法指令或通讯异常,确保机器人实地运行中的人机交互安全。
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
相关推荐
拟人感官智能语音交互型机器人头部设计
机器人实时远程控制系统及其开发库的设计与实现
modelsim最详细最权威的入门教程
Ouster推出 Rev8 OS 激光雷达系列 原生彩色激光雷达正式落地
“车规级 IMU”适合机器人的大规模应用
硬件工程师必读攻略-如何通过仿真有效提高数模混合设计性(下)
安波福与柯马携手开发新一代机器人、自主系统及工业物流解决方案
DFRobot的拓展型全向变形机器人(2)
摩尔线程 × 光轮智能|强强联手,共筑国产具身智能仿真底座
Ansoft机电系统设计仿真工具
Altera2012亚洲创新设计大赛CN099视频介绍-01
“车规级IMU”适合机器人的大规模应用,可提供稳定可靠的运动感知功能
暖场表演:体操机器人
modelsim使用手册
暖场表演:机器人舞蹈
自攀爬幕墙清洗机器人控制系统设计
仪表仿真工具Glstudio
意瑞半导体:霍尔传感器在机器人中的应用优势
乒乓球游戏电路的CPLD仿真设计电路图
视景建模与仿真工具MultiGenCreator/Vega
具身智能/灵巧手的感测目标:将物理世界可靠、高精度、低时延地映射到数字系统之中
硬件工程师必读攻略-如何通过仿真有效提高数模混合设计性(上)
加速电路设计的软件
常见 FPGA/PLD及VHDL/Verilog 开发软件
仿真自然风控制器
特斯拉Model S和Model X正式停产
步进电动机及其驱动控制系统
霍尔传感器在机器人中的应用优势
555仿真自然风控制器电路
MIPI成立物理AI兴趣小组,面向机器人企业开放参与