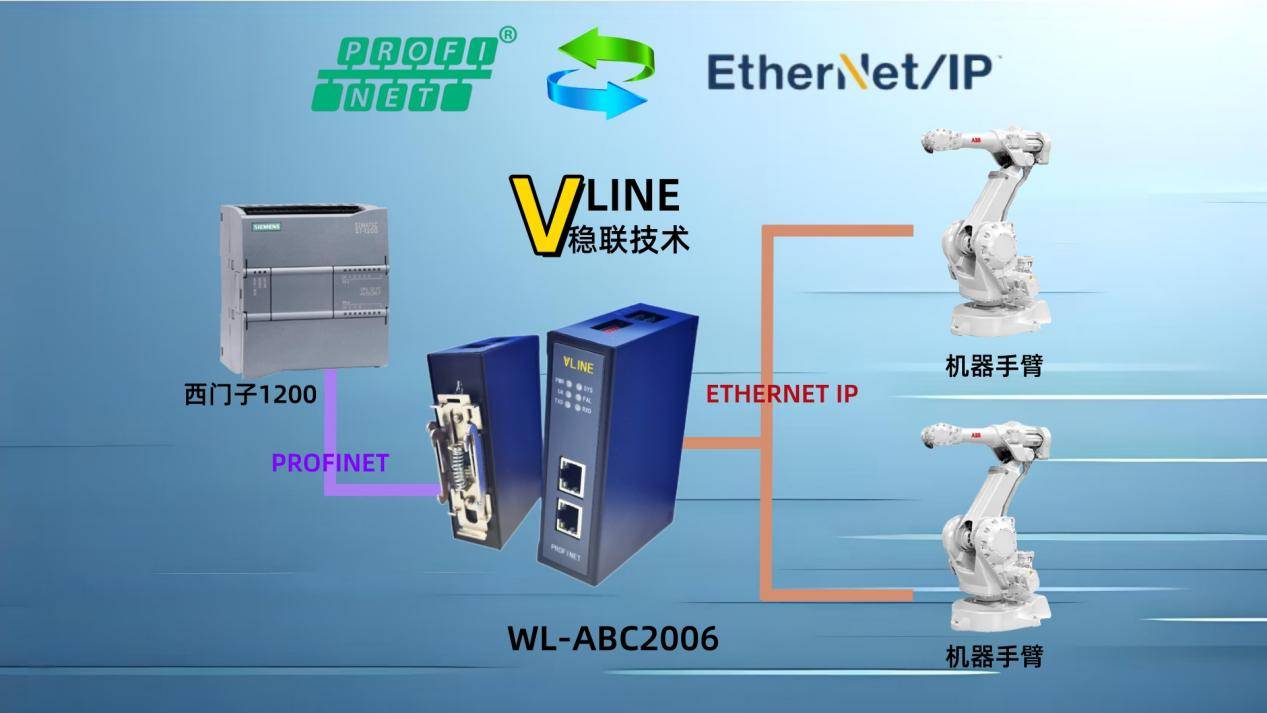
极速组态!Profinet转Ethernet网关让ABB机器人主站秒连工业网络(上集)

本案例呈现的是ABB机器人以Ethernet/IP主站的身份,与作为Ethernet从站的网关建立连接,而后网关将数据转换为Profinet协议,以供西门子PLC进行读写操作。
配置流程:
获取ABB机器人授权许可
启用841-1功能模块


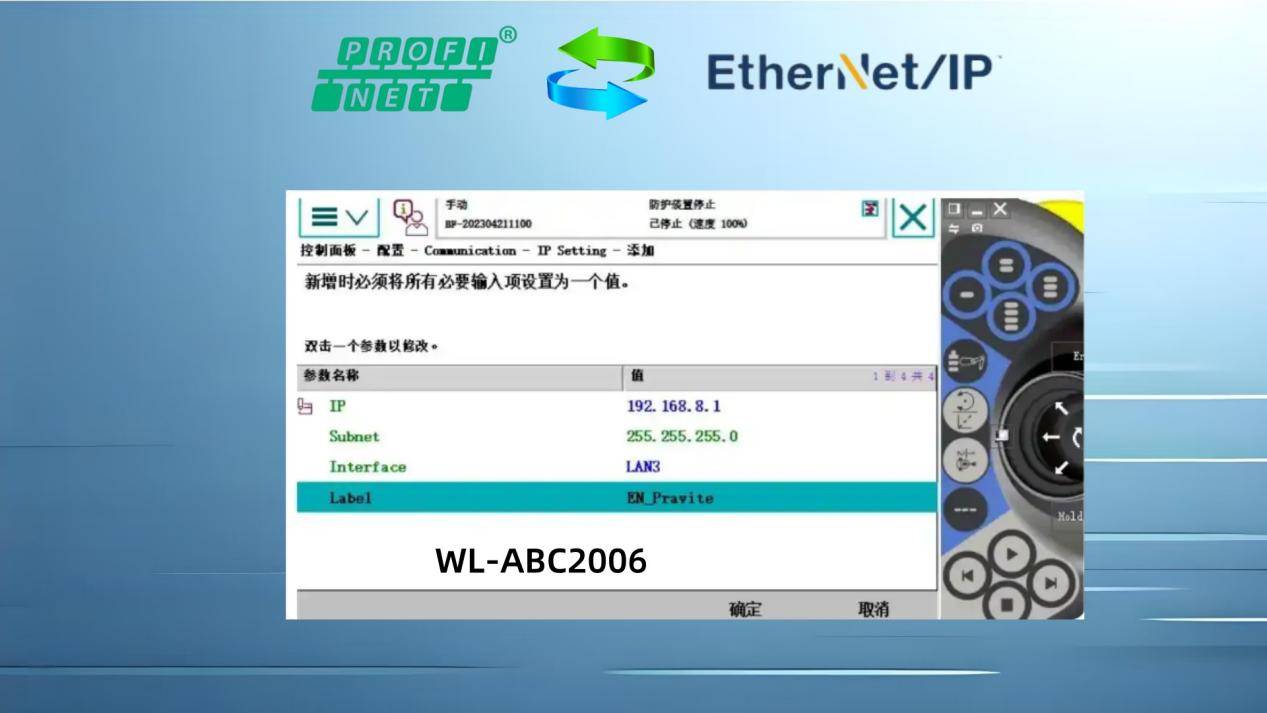
若需对机器人的IP地址进行设置,可按顺序依次点击“控制面板”“主题”“IP设置”“通信”。
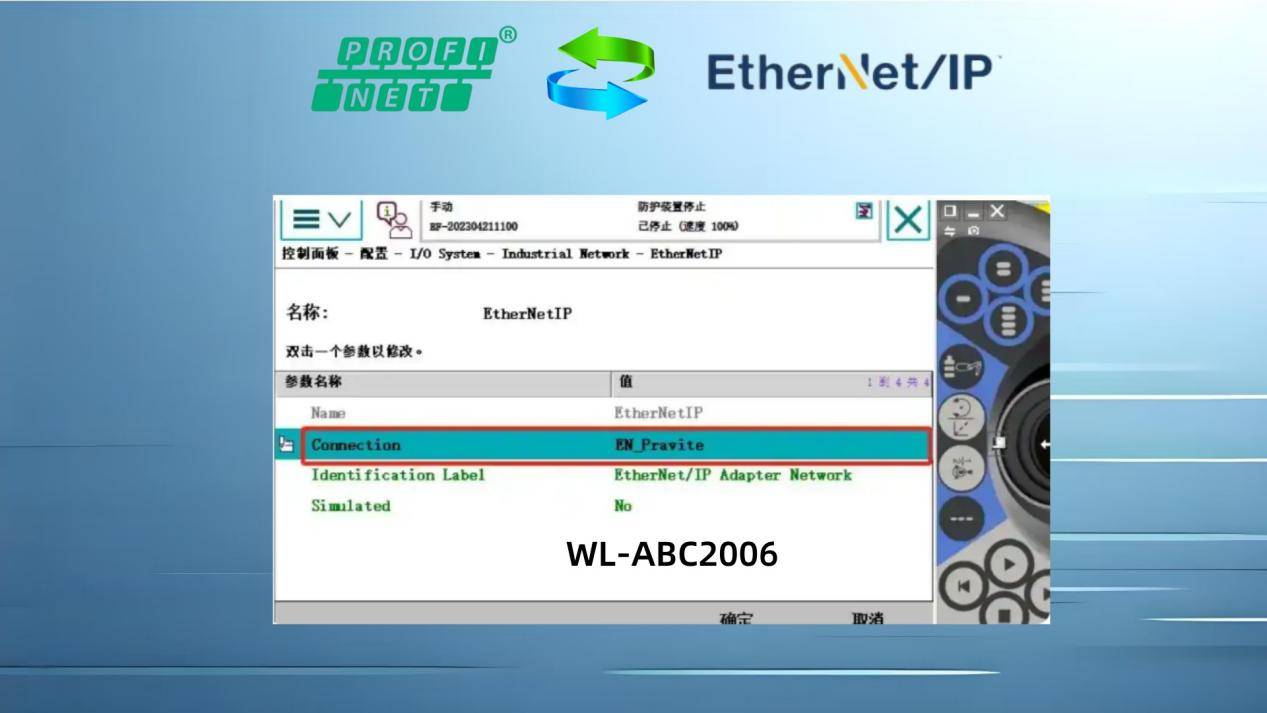
选取从站模块以实现网络连接
操作路径为:控制面板→配置→主题→I/OSystem→IndustrialNetwork→EthernetIP
选择上一步所创建的IP
导入EDS文件
将EDS文件复制至机器人Home文件夹下的EDS文件夹。
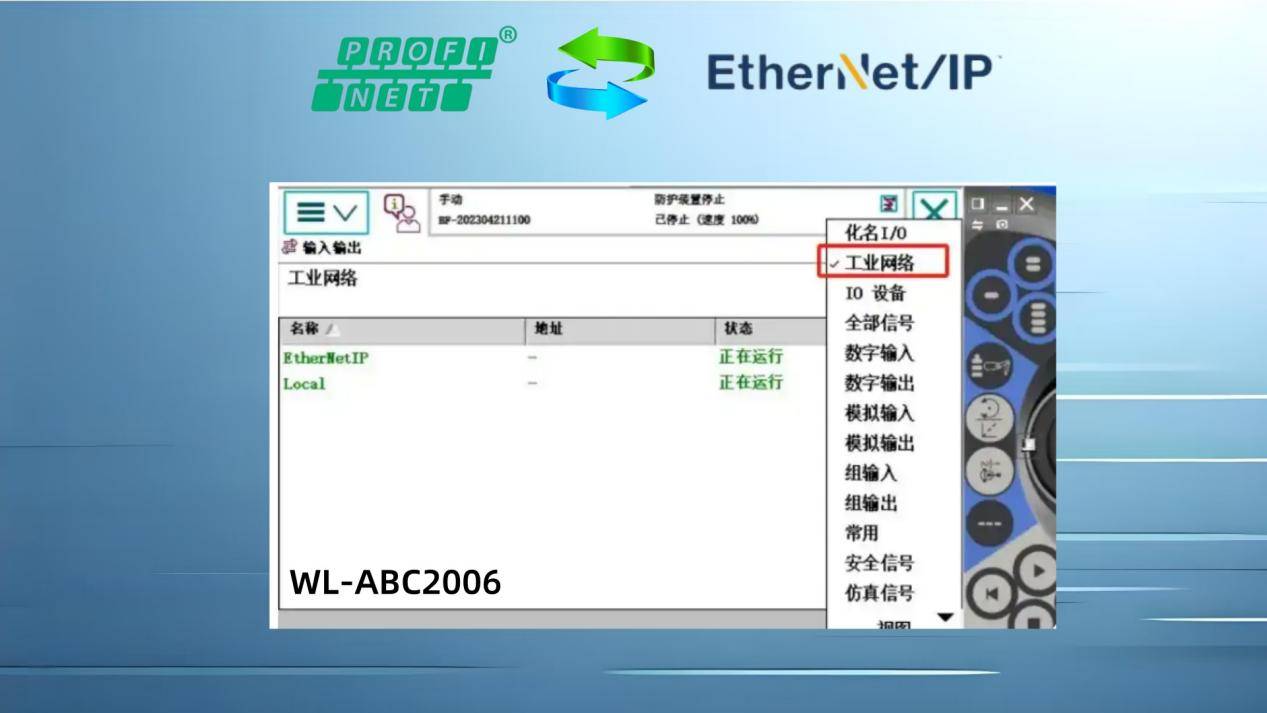
扫描EDS文件:进入输入输出窗口,依次选取“视图”“工业网络”,选定EthernetIP,点击右下角“扫描EDS文件”选项。
构建EIP模块从站配置。
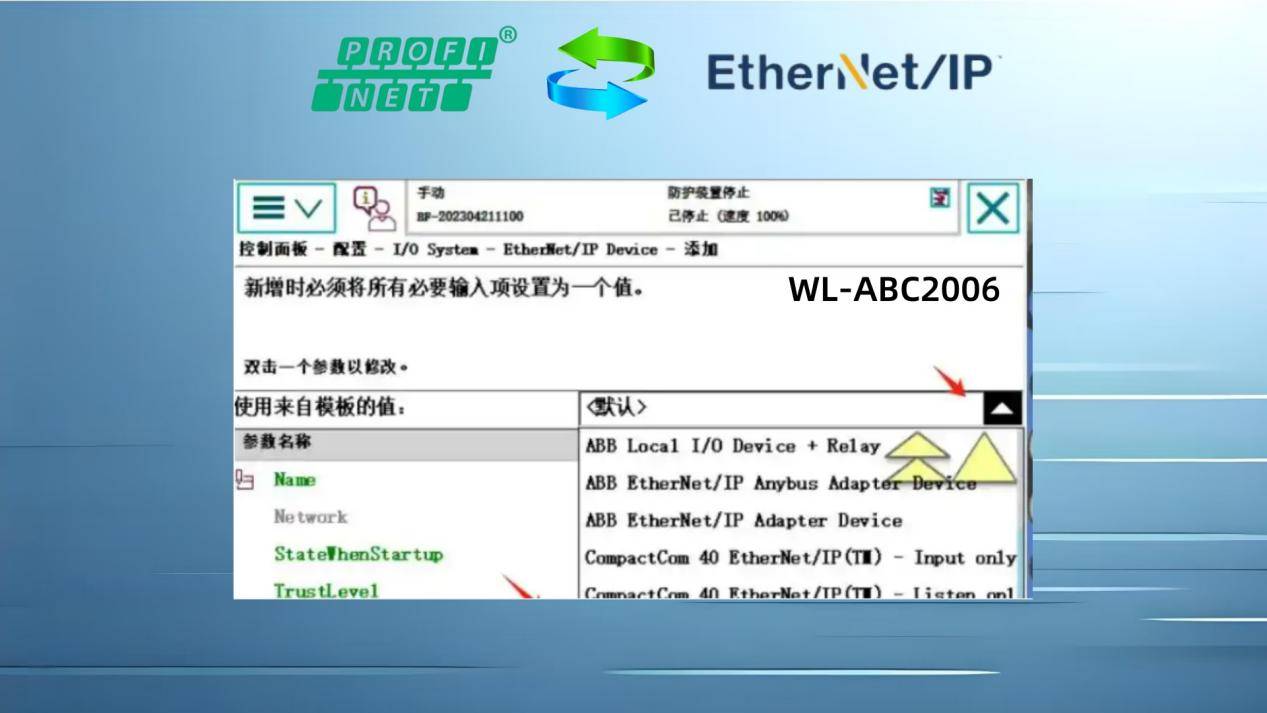
于控制面板依次选择“配置”“主题”“I/OSystem”“Ethernet/IP”,并执行“添加”操作。
选取模板,选择刚导入的EDS文件EIP001。
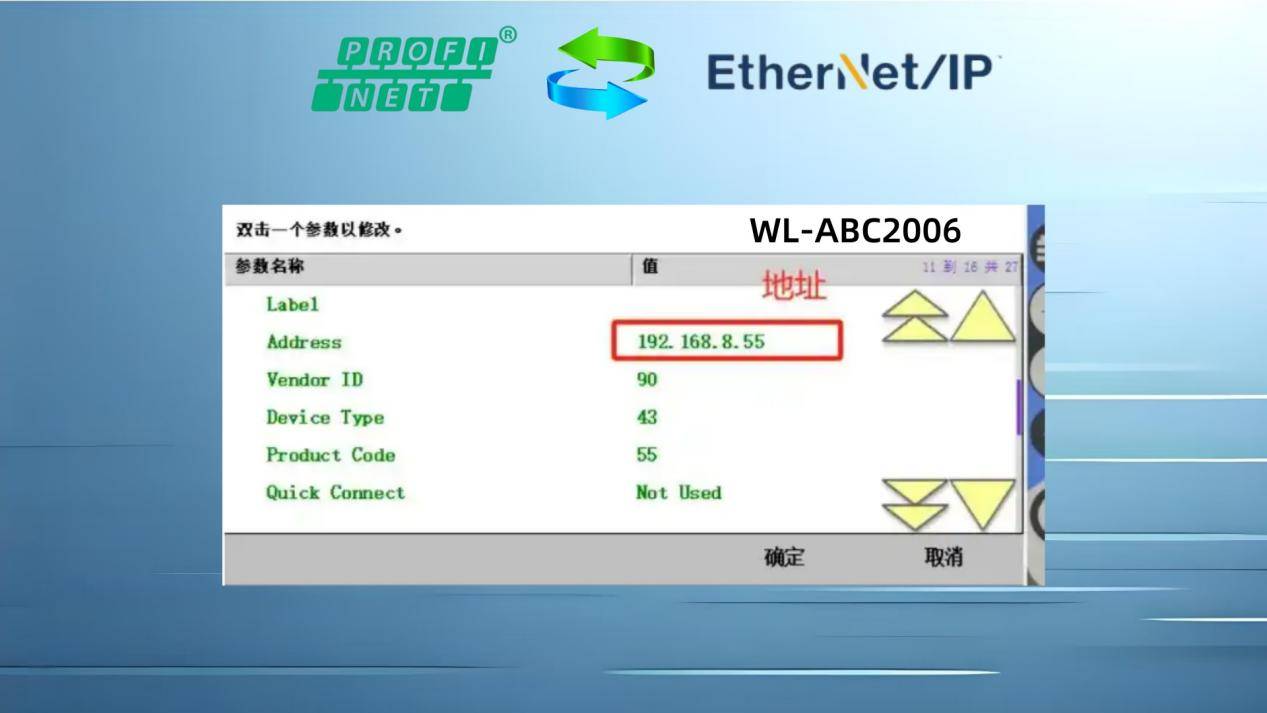
对站点的当前IP地址以及名称予以修改

上述步骤为ABB机器手臂参数设置的具体步骤及注意要点,关于ABB机器手臂设置的介绍,本期暂告段落。下期将阐述PROFINET转Ethernet/IP网关组态以及配置软件的使用步骤与方法。
上述步骤为ABB机器手臂参数设置的具体步骤及注意要点,关于ABB机器手臂设置的介绍,本期暂告段落。下期将阐述PROFINET转Ethernet/IP网关组态以及配置软件的使用步骤与方法。
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
关键词:
ethercat
profinet
devicenet
相关推荐
符合创新的工业以太网标准的PROFINET IO器件
PROFInet简介
支持高速高精度控制和EtherCAT通信的RZ/T2L MPU
DeviceNet 请问那里有 DeviceNet 的协议
LAN9252 EtherCAT®从控制器
开启工业4.0:集成EtherCAT和莱迪思FPGA实现高级自动化
DeveiceNet网络产品选型指南
工业以太网向EtherCAT及更高标准发展之路
基于西门子PLC S7-1200与ABB IBR120柔性控制系统的设计
511W/kg能效,温度直降66℃!机器人关节电机迎来氮化镓革命
瑞萨电子发布全新RZ/T2L工业用MPU可通过EtherCAT通信实现快速、准确的实时控制
EtherCAT®和Microchip LAN925X从站控制器介绍培训教程
实时以太网EtherCAT从站的硬件系统设计
PROFINET: 整体的考虑定义了工业自动化
面向工业4.0的EtherCAT——来全面认识它一下
CADAM系列IO模块用户手册 V1.2
EtherCAT PLC参考平台
双芯闪耀GDSCN832和GD32H75E激发EtherCAT更强威力
DeviceNet 规范
基于CAN的高层协议CANopen与DeviceNET的比较
用于工业自动化的全网运动控制同步
如何移植EtherCAT Igh 基于米尔RK3576开发板
DeviceNet 网络结构
EtherCAT和Microchip LAN9252从站控制器培训教程
CAN控制器的选择
贸泽开售Renesas RZ/T2L高性能微处理器,为EtherCAT通信提供实时控制
基于EtherCAT工业以太网双轴电机控制方案
基于CAN的较高层协议和子协议
国产化EtherCAT主站控制器解决方案,米尔基于全志T507-H核心板
应关于新一代高速实时以太网PROFINET