
【检测目的】
五金件机器视觉定位,视觉检测五金件轮廓并矫正五金件位置进行涂油
【客户要求】
FOV:540*400mm
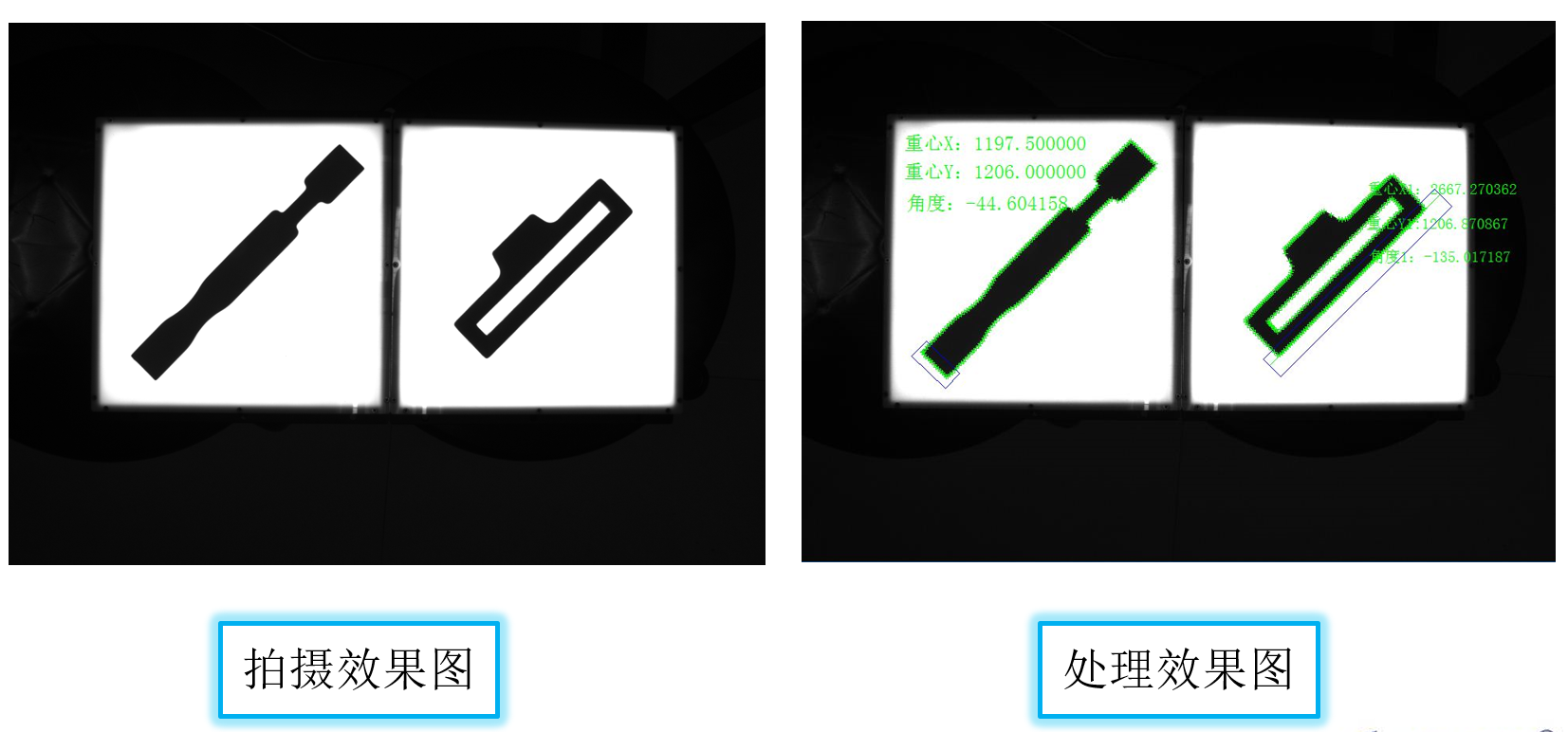
【拍摄与处理效图一】
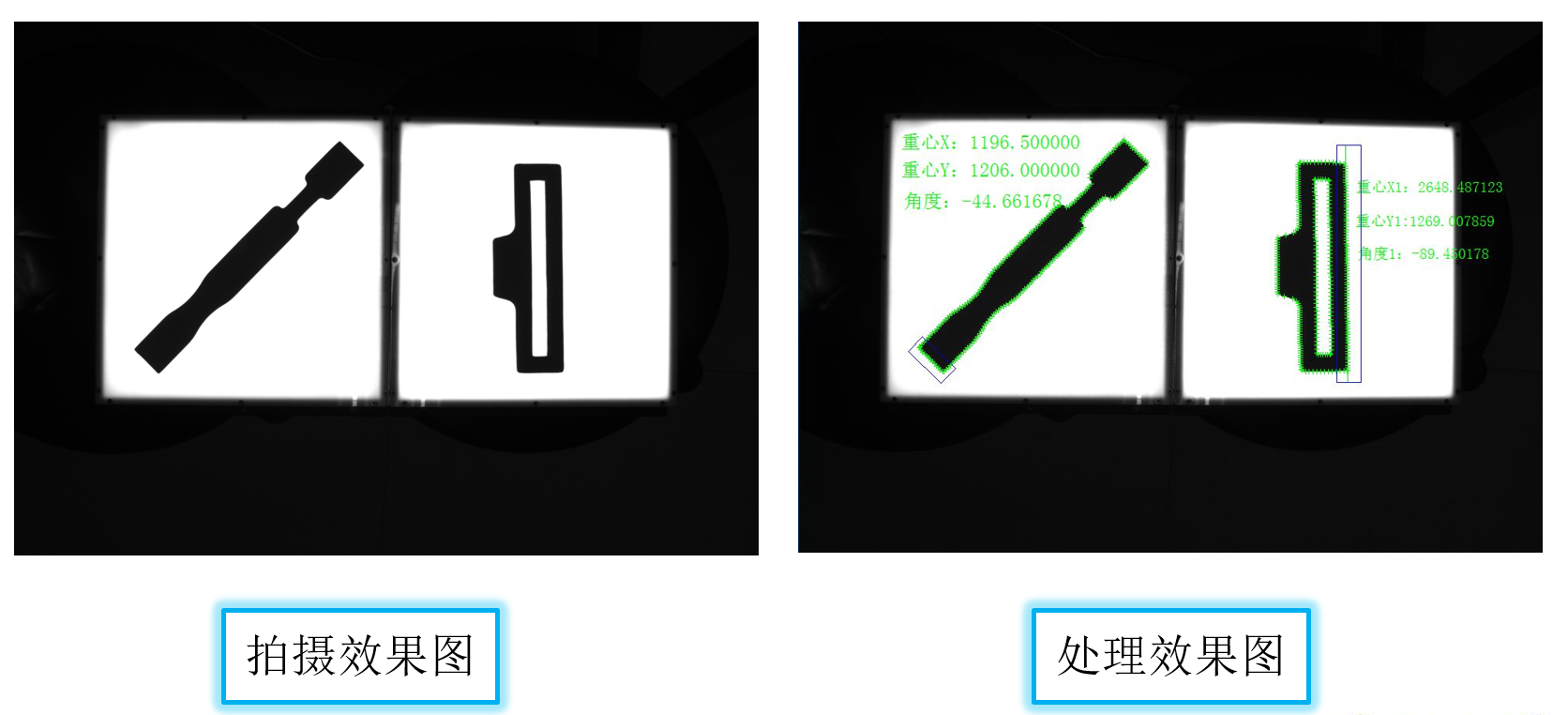
【拍摄与处理效图二】
【实验原理及说明】

【方案评估】
根据目前的图像和处理结果来看,可以检测出产品轮廓并进行位置矫正,提供边缘坐标供机械手进行涂油。
视野:543mm*400mm
视觉精度:543mm/3840pix=0.14mm/pix。
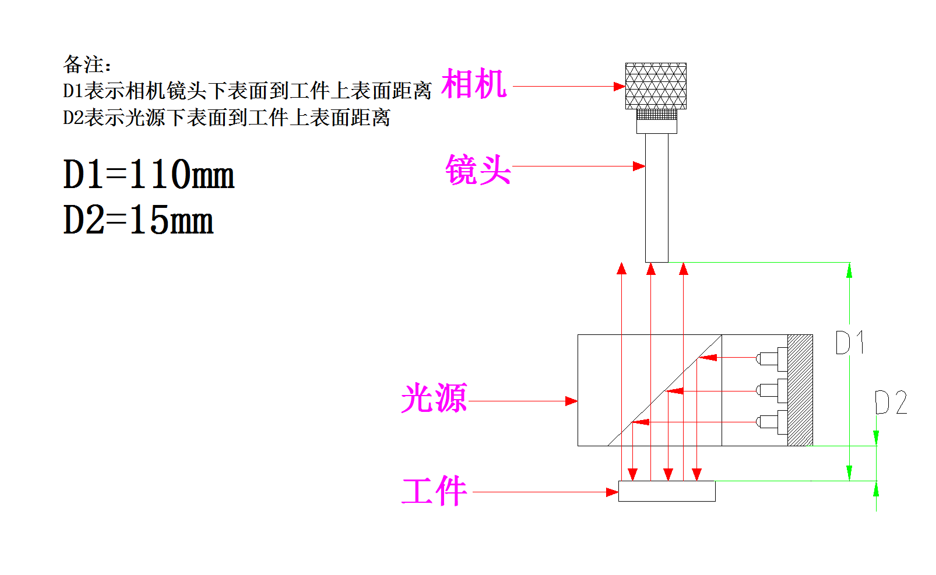
【安装示意图】
【硬件配置】

【检测目的】
五金件机器视觉定位,视觉检测五金件轮廓并矫正五金件位置进行涂油
【客户要求】
FOV:540*400mm
【拍摄与处理效图一】
【拍摄与处理效图二】
【实验原理及说明】
【方案评估】
根据目前的图像和处理结果来看,可以检测出产品轮廓并进行位置矫正,提供边缘坐标供机械手进行涂油。
视野:543mm*400mm
视觉精度:543mm/3840pix=0.14mm/pix。
【安装示意图】
【硬件配置】
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
相关推荐
基于图像传感器的CPLD视觉系统设计
斯巴鲁基于 AI 的 EyeSight 安全系统集成 AMD 自适应计算技术
工业机器人视觉系统七大选型原则
凌华科技推出基于NVIDIA Jetson Xavier™ NX的工业级4通道PoE AI视觉系统
视觉系统确保汽车行业的速度和准确性
选择视觉系统器件,你可以按这7步来
图像传感器OV7620在自主足球机器人中的应用
视觉系统在汽车门锁装配检测中的应用
革新视觉系统的设计和效率,这两款图像传感器了解一下
从这几款全局快门图像传感器,了解图像传感器的选型要点
基于特征匹配的芯片管脚视觉检测系统设计
Vision HDL Toolbox功能增加,适用于高达8k分辨率的帧尺寸和高帧率视频
传统相机开发基本流程参考请收藏!
利用运动唤醒功能优化视觉系统的功耗