
【检测目的】
建材陶瓷片机器视觉定位
【检测要求】
精度0.02mm
产品大小:60mm—70mm
颜色为:白、绿两种
5S图像处理时间
【拍摄效果图一】 上料位

【拍摄效果图二】 上料位

【拍摄效果图三】 上料位
【拍摄效果图四】 上料位

【硬件配置】 外框

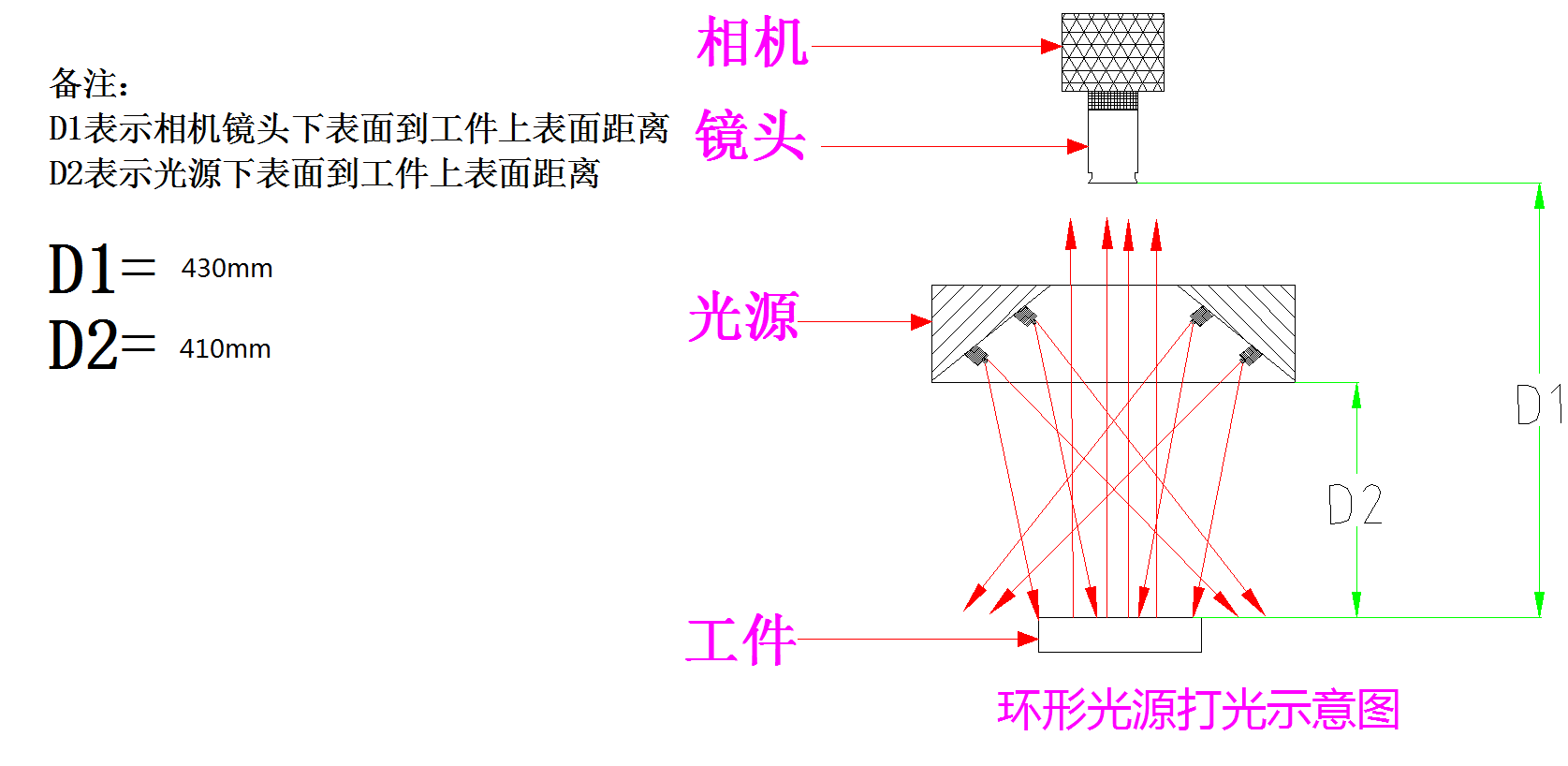
【打光示意图】 上料位

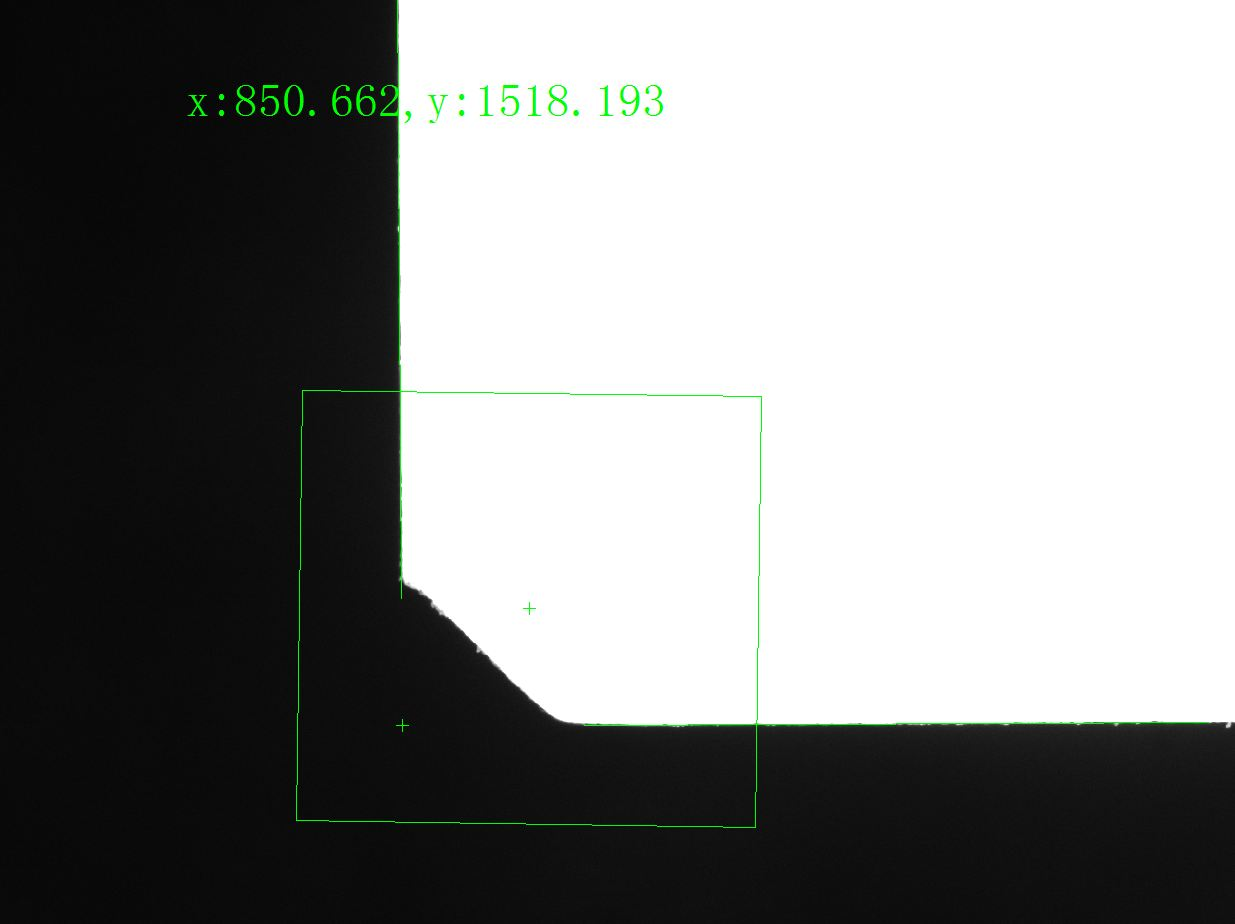
【拍摄效果图一】 下料位

【拍摄效果图二】 下料位

【拍摄效果图三】 下料位

【硬件配置】 下料位

【打光示意图】 下料位
【方案评估】
整套方案分三个工位
1.上料位:机械手吸取产品以后,相机移动从下往上拍摄产品四个角去定位中心和角度
视野:7mm*5.25mm
视觉精度:7mm/2592pix=0.003mm/pix
2.载具校准工位:没有提供载具样品,暂没做实验
3.下料位:相机固定,拍摄产品整体去定位
视野:100mm*75mm
视觉精度:100mm/2592pix=0.039mm/pix
相关推荐
视觉检测设备的崛起,助力医疗设备的发展
图像传感器OV7620在自主足球机器人中的应用
煅造视觉检测的“火眼金睛”,Sherlock8可助一臂之力
基于云端协同的产品包装外观质量检测系统*
革新视觉系统的设计和效率,这两款图像传感器了解一下
传统相机开发基本流程参考请收藏!
利用运动唤醒功能优化视觉系统的功耗
图像采集卡是什么东西?
基于图像传感器的CPLD视觉系统设计
发动机曲轴非接触式自动检测系统的研制
高速工业相机:快节奏“慢放”,远距离“微视”
当6 TOPS不再是极限:米尔RK3576 + Hailo-8,让高帧率摄像头真正“实时”
基于机器视觉的变电站智能机器人的研制*
AMD 锐龙嵌入式 7000 系列助力研华科技 Micro-ATX 主板
斯巴鲁基于 AI 的 EyeSight 安全系统集成 AMD 自适应计算技术
从这几款全局快门图像传感器,了解图像传感器的选型要点
视觉系统在汽车门锁装配检测中的应用
一种非标定摄像机的定位新算法