IMU校准,到底校准什么?

简介
最近在学习传感器相关的知识,在国外的一篇论文学习过程中,觉得这篇论文的校准方法是个不错的参考。这种校准简单且比较鲁棒的算法,操作简单,且除了偏移与比例系数,还可以估计出传感器 xyz 轴相对于标准正交三轴的偏移(因为传感器的物理 xyz 轴可能不是标准正交的),不过相比六面校准,其算法的计算过程要复杂许多。其校准过程也并不复杂:1)初始静止一段时间2)旋转 IMU 到另一个角度之后静止3)等待一段采样时间4)继续旋转,重复 2)3)步骤,达到预定的采样次数5)估计参数思路理想的 IMU,x,y,z 三轴是独立正交的,理想的三轴坐标系,加速度计的理想坐标系可以记作 AOF,实际中的 IMU 的坐标轴并不是标准正交的,其与标准正交坐标系有一定的偏移,将各轴的偏移记作 β,之后建立误差模型,建立代价函数,进而求解估计参数。加速度计部分坐标轴定义假设现有一个标准正交坐标系,记作 s(B),当前坐标轴记作 s(S) ,当前轴可能是非正交的,从 y 轴到 z 轴的偏移记作 β(yz),其他的以此类推,那么 从 s(S) 转换到正交坐标系 s(B) 的表达式就可以写作如下形式:

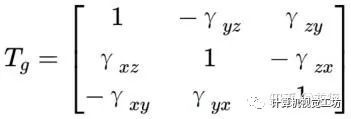
T 是其中的旋转矩阵,为:
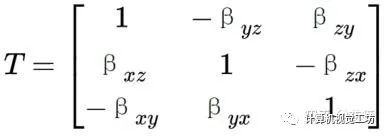
以此为基础,将加速度计的标准正交轴记作 a(B),加速度计当前坐标轴记作 a(S) ,但上面的旋转矩阵 T 有点复杂,需要对其进行简化,现给出两个坐标轴选取时的条件:1)定义加速度计的标准正交轴为 AOF,加速度计实际的坐标轴记作 AF(AF不一定正交),将 AOF 的 x 轴与 AF 的 x 轴重合2)AOF 的 y 轴定义在 AF 的x 与 y 轴组成的平面上按照上述的两个原则建立坐标轴,那么在上述旋转矩阵的 β(xz),β(xy) 就消除为 0,因为AOF 与 AF 的 x 轴已经重合了,因此 x 轴相对 y,z 轴的偏移就消除掉了。因为 AOF 的 y 轴在 AF 的 x,y 轴组成的平面上,因此 y 相对于 x 的偏移也消除掉了,即 β(yx) = 0。那么针对加速度计,上述坐标轴的表达式就可以写作:

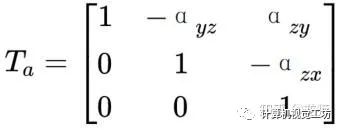
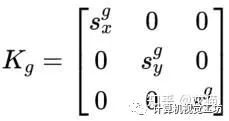
加速度计模型在加速度计的零偏与比例系数的基础上,加上上述的坐标轴偏移,就可以得到加速度计的模型。加速度计的比例系数矩阵记作 K(a):
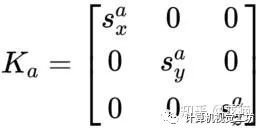
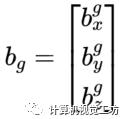
加速度计的零偏向量记作 b(a):
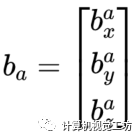
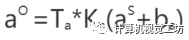
加速度计整体的误差模型就可以写作:

v 表示测量噪声,a(O) 表示标准轴的加速度值,a(S) 表示真实轴上的加速度计测量值。此方程中,含有 9 个未知量,三轴的轴偏移,三轴的比例系数,三轴的零偏。将代估变量记作 θ:

将测量噪声忽略掉,误差模型就可以写作:
代价函数建立对于此方程,不用六面校准,而是任意角度的加速度计数据的话,采样一定量的数据之后,可以利用这个原理来列出其代价函数:静止状态下,加速度计三轴的数据的平方和等于重力加速度 g其代价函数就可以写作:

以上的代价函数是有加法的,运用最小二乘法来估计参数比较困难,因此使用 LM 算法来进行非线性估计。陀螺仪部分陀螺仪的校准需要依赖于加速度计的校准。总体思路为:1.在进行完上一步的加速度计估计参数的计算之后,利用加速度计已经校准过的参数矩阵对之前采样的数据进行校正2.在采样时的每一次静止时的加速度计数据进行校正后,可以得到一个较为准确的重力加速度向量值3.当前静止时的重力加速度向量记作初始重力加速度向量,然后在旋转IMU时,使用陀螺仪的数据对重力向量进行积分,可以得到一个旋转后(到下一次静止采集数据)的重力向量预测值4.再次使用加速度计的数据得到一个重力加速度向量值5.利用加速度计得到的重力加速度向量与陀螺仪积分得到的重力加速度向量做差,平方的方式,建立代价函数6.求解代价函数,得到陀螺仪的估计参数误差模型建立陀螺仪与加速度计的坐标轴应该选择相同的参考坐标轴,也就是 AOF ,但对于陀螺仪来说,因为选取的加速度计的标准正交轴,一些坐标轴的偏移量就不能消除了,还是需要加上,即:

其中,T 为旋转矩阵,W(O) 表示陀螺仪的正交标准轴,与 AOF 重合,W(S) 是当前的陀螺仪轴比例系数与偏移系数矩阵都与加速度计的形式是相同的:
误差模型的形式也是相同的:

在后续的计算中,测量误差 v 可以忽略。代价函数建立按照上述的步骤说明,代价函数使用加速度计校准后得到的准确的重力加速度向量与陀螺仪积分得到的重力加速度向量的各项差的平方和来建立:

同样,使用 LM 算法来进行参数的估计
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
相关推荐
PowiGaN for AI Data Centers: Unmatched Power Density and Reliability
基于Microchip MCU的AI/ML培训教程2
海联达(Aigale)Ai-HD1 无线全高清套件拆解
基于Microchip MCU的AI/ML培训教程1
人工智能是如何帮助阻止造假者的?
研华科技与Axelera AI深化战略合作 加速推动基于Europa平台的边缘AI创新
联发科加速AI在地化应用布局
iCAN-4017 AI功能模块
基于Ai-WB2-12F与Rd-04的雷达检测系统
EEPW2018年3月刊(工业物联网)
被动元件新周期:AI时代高端化、服务器化重构MLCC产业格局
基于Microchip MCU的AI/ML培训教程3
存储器转型AI战略资源 台厂受惠
AI聊天机器人能像医生一样推理吗?
WTC-AI太阳能热水器电路图
EEPW2018年6月刊(5G)
CSR8670CSR8675智能语音Alexa蓝牙方案开发
电子元件培训教材
尼吉康的事业介绍
基于VisitionX制造智能眼镜
重新构想AI电源:塑造AI加速的未来(第三部分)
前Qwen负责人林俊旸创业,目标融资规模为数亿美元
瑞萨电子AI单元解决方案成功提高GE医疗(日本)日野工厂的生产力
思科凭借通用商用芯片与光模块赢得 AI 领域客户
WTC-AI型太阳能热水器电路图
国家“算力网”:像用水用电一样用AI
AI/HPC新世代 COUPE光互连扮要角
释说芯语16:硬科技:构建企业未来之路(附PPT)
万家乐JSYZ5-AI燃气热水器电路图
继上次海联达Ai-ap100拆机之电源改造