还可以这样实现ARM+ROS(机器人操作系统)

如何低成本搭建ARM+ROS的硬件载体?本文将为读者提供一个全新的技术方案。全文分概述、硬件与底层、ROS搭建三个章节,敬请订阅。
ROS是机器人操作系统(Robot Operating System)的英文缩写,是用于编写机器人软件程序的一种具有高度灵活性的软件架构,其原型源自斯坦福大学的Stanford Artificial Intelligence Robot (STAIR) 和 Personal Robotics (PR)项目。

ROS是一个用于实现机器人编程和开发复杂机器人应用程序的开源软件框架,依托于Linux之类的操作系统上,所以ROS也被称为元操作系统或中间件软件框架。ROS提供了各类成熟的功能包,如:摄像头驱动、OpenCV图像处理、SLAM建图导航等。功能包中的代码可以是C++、Python、Octave等不同的编程语言编写,虽然不同模块基于不同语言编写,但仍可以被ROS组合起来一起使用。这意味着,当开发新款机器人时,开发者不需要做基础的传感器驱动、甚至不必实现某些应用,直接调用ROS自带的功能包,同时ROS是分布式架构,对于大型复杂机器人而言,可以把各个功能分别部署在不同控制板上。

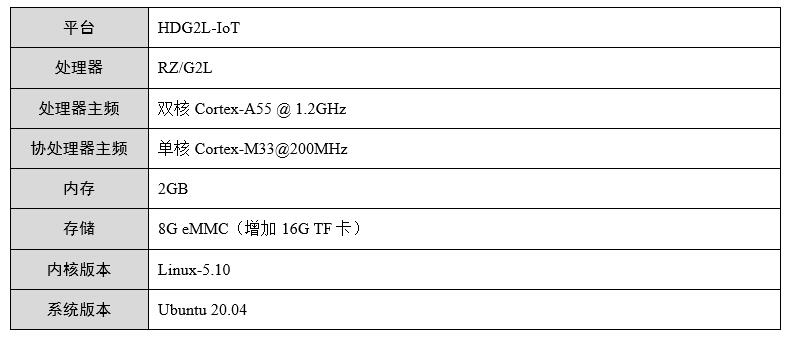
本文档使用本司的HDG2L-IoT评估套件来实现ROS应用环境,硬件产品如下所示。

硬件平台环境条件如下所示:
表2.1 硬件平台资源
目前实现ROS的方式主要有两种:
Ubuntu系统+ROS;
Ubuntu系统+docker+ROS镜像;
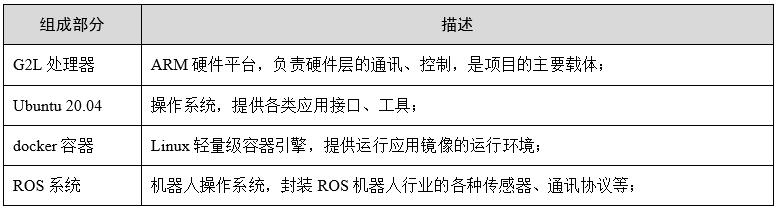
相对而言,使用dockers运行ROS镜像的部署方式,可以大大加快设备部署、移植工作。第二章节也将基于方案2去实现ROS,组成项目的各个部分功能如下所示:
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
相关推荐
股权脱钩 台积电清仓手中Arm全部股权
边缘 AI 加速的 Arm Cortex‑M0+ MCU 如何为电子产品注入更强智能
ARM 展示小型低功耗上网本样品
本站成立e-ARM开发工作室!
e-ARM的PCB板已经做好,s3c4510b很快买到
安谋科技Arm China与国民技术签署Arm Total Access授权许可协议,加速AI时代MCU灵活创新与高效落地
ARM嵌入式软件编程经验谈
最新ARM技术和嵌入式技术发展动态 中
ARM Axion 处理器加持谷歌第八代 TPU,云端全面转向智能体 AI 架构
今日上传e-ARM全部文档至本站下载区
arm学习资料
Arm 宣布推出 Performix,为开发者带来 AI 时代必备的可扩展性能
ARM嵌入式系统开发:软件设计与优化
WinCE+ARM开发及关键技术 下
基于ARM/DSP 的高性能驱动方案
基于ARM-Linux的MiniGUI的仿真与移植
Cyclone V SoC开发套件和SoC嵌入式设计套装
ARM嵌入式系统开发
Arm宣布推出Performix,为开发者带来 AI 时代必备的可扩展性能
最新ARM技术和嵌入式技术发展动态 下
Arm CEO:AI智能体将推动CPU核心数升至 512
面向ARM系统集成的FPGA片上系统解决方案
Arm财报过山车:营收创纪录,股价跌7%
ARM开发详解
RTL8201L缺货,xiaohua,E-ARM你们买得到吗?
KEA: Kinetis KEA - 面向工业控制和运输行业的超可靠5V MCU
Arm遭遇监管危机:FTC针对其技术授权启动反垄断调查
WinCE+ARM开发及关键技术 上
咱们的e-Arm进行的咋样了?板子画了吗?
“当TDC-GP22遇到ARM CortexM3” ——世强专家解读智能超声波水表的技术创新趋势