指南|研控EtherCAT总线驱动器与正运动主站控制器连接步骤

前面几期《指南》中,我们分别介绍了研控EtherCAT总线(后文简称“E总线”)驱动器与倍福、欧姆龙、基恩士、松下主站的连接步骤及注意事项。
这次,我们将重点介绍研控E总线驱动器与正运动EtherCAT主机的连接步骤,可用于研控现有的11款E总线驱动器,以及即将发布的AS3-BNI系列伺服驱动器,希望对您有所帮助!
一、应用说明(提示内容)
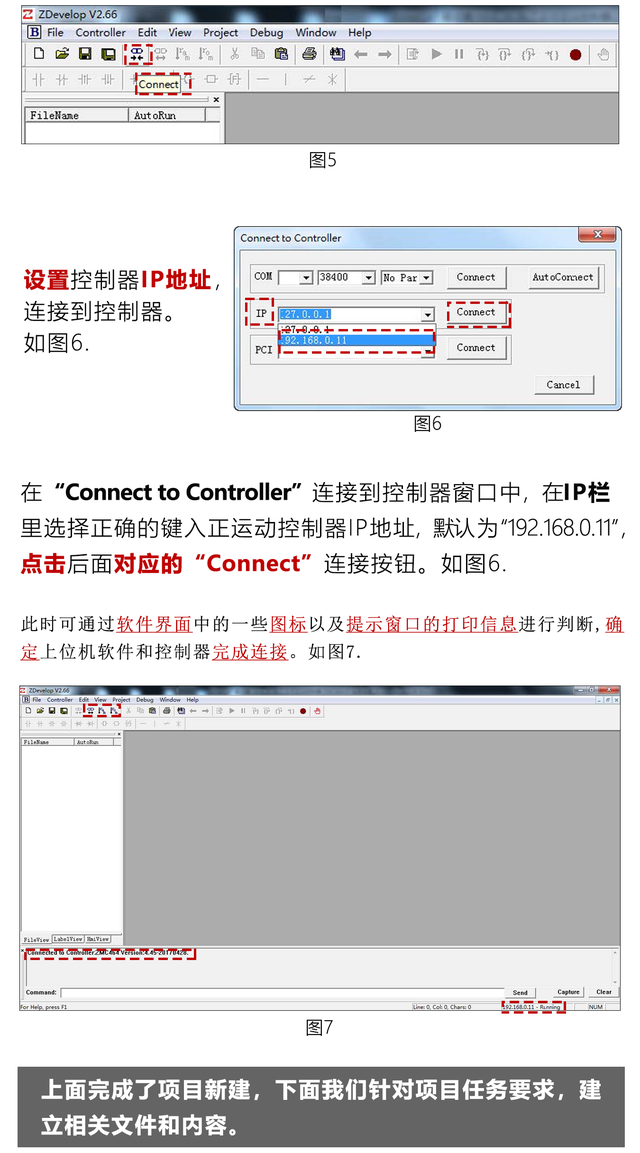
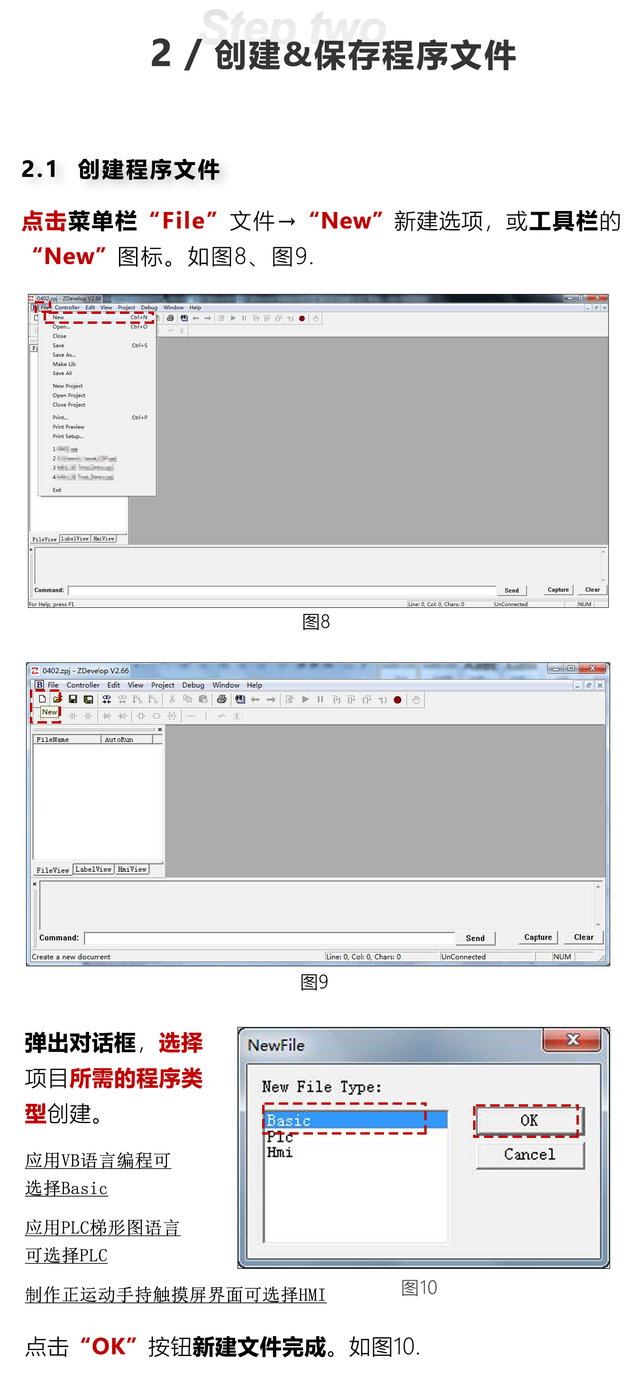
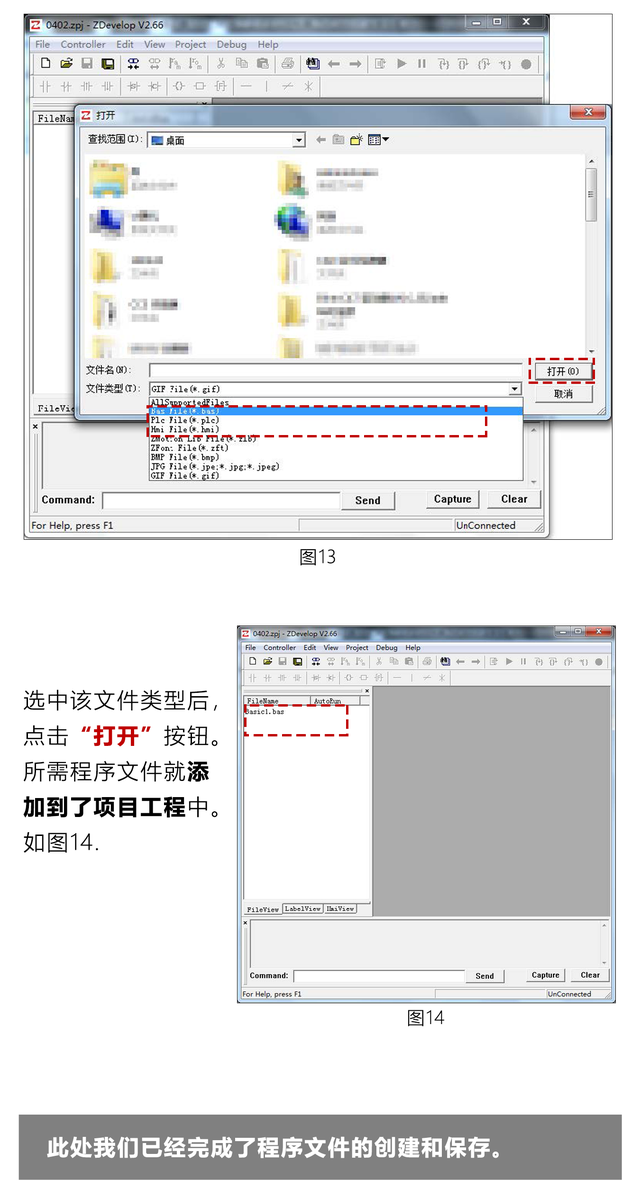
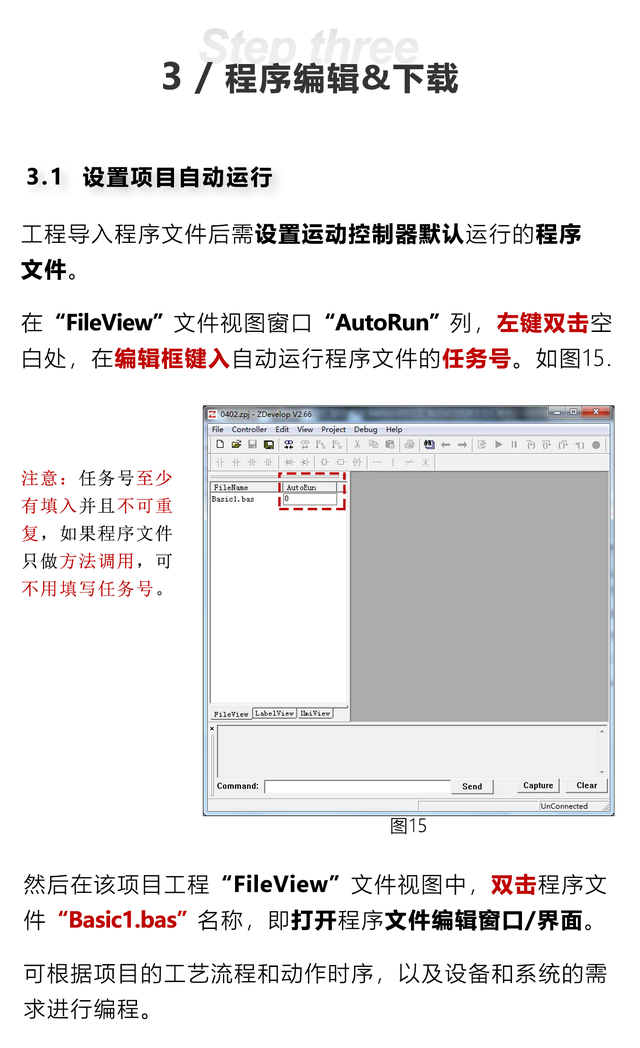
本文介绍如何使用“正运动主站控制器的EtherCAT主机(EtherCAT总线运动控制器)”及其上位编程开发软件“ZDevelop.exe”连接并控制YAKO的EtherCAT总线驱动器。
【按照步骤操作后,可以使用该上位编程开发软件的开发程序,通过YAKO的EtherCAT总线驱动器来控制电机运动。】
如需了解更高级的运动控制功能,请咨询深圳正运动技术有限公司的相关技术人员。
本《指南》适用于全系列:正运动主站控制器EtherCAT主机(EtherCAT总线运动控制器)、YAKO EtherCAT总线驱动器和配套电机。
请注意:
本文运动控制器以正运动ZMC464为例,驱动器以“研控混合伺服MS-Mini3E”为例,因此文中操作界面的相关产品型号会显示为“ZMC464”、 “MS-Mini3E”,但本指南适用于研控全系列EtherCAT总线驱动器。
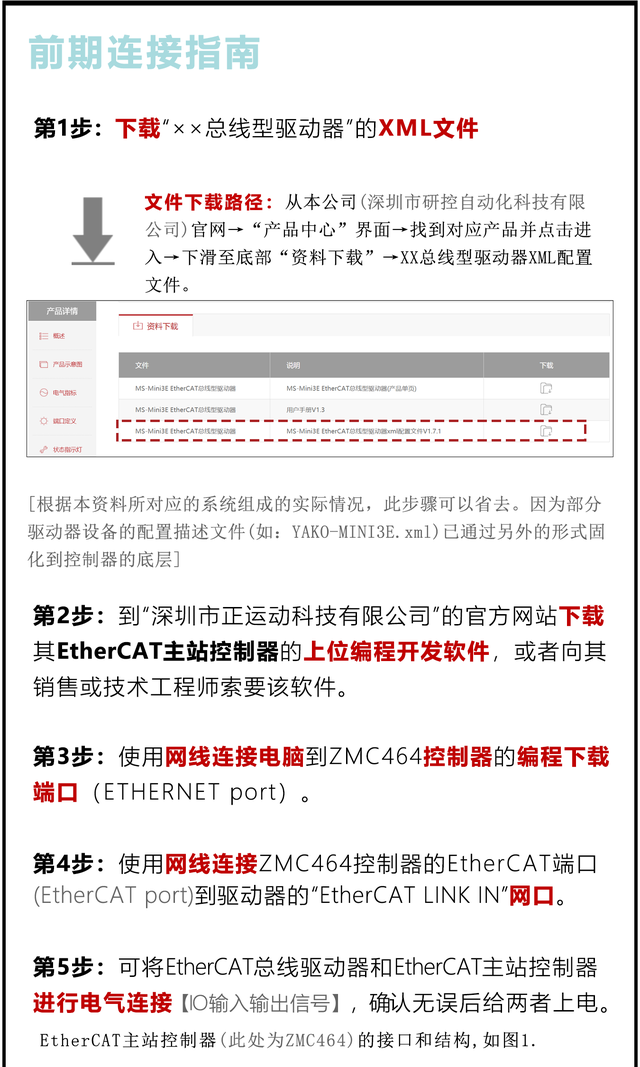
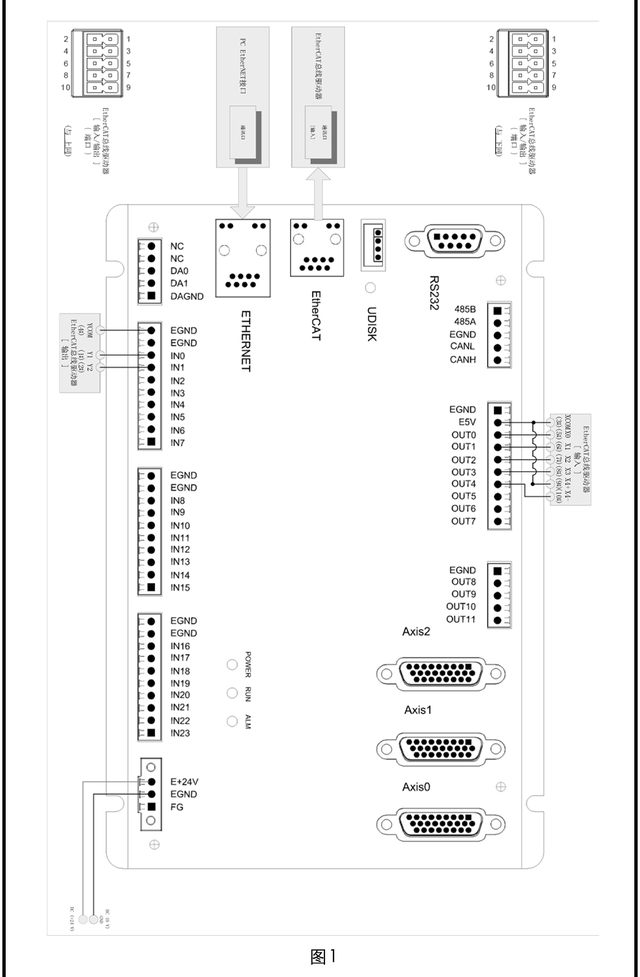
二、连接指南(正文内容)

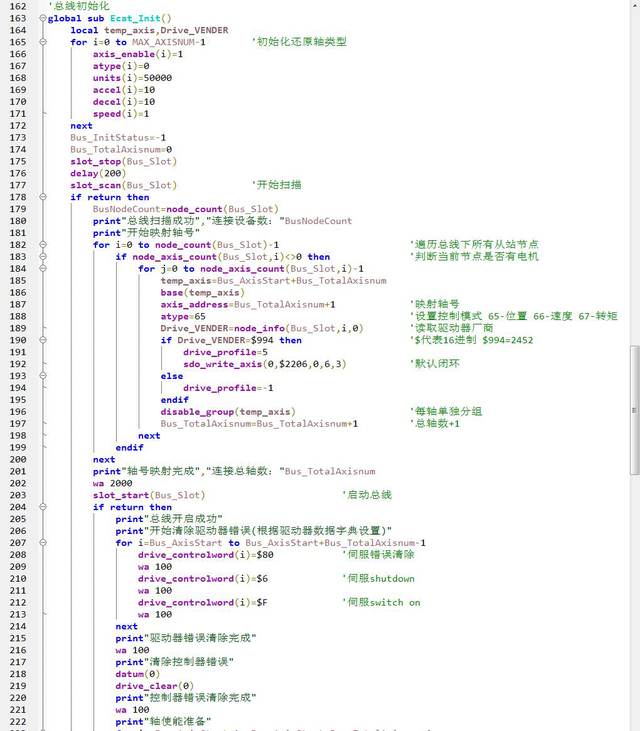
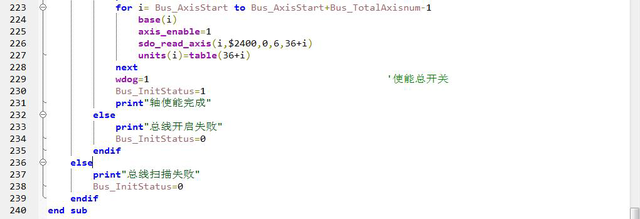
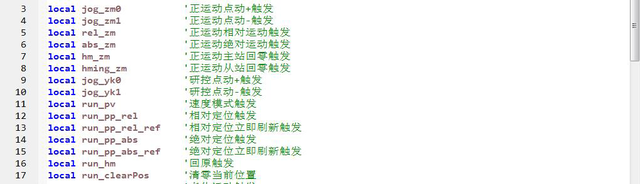
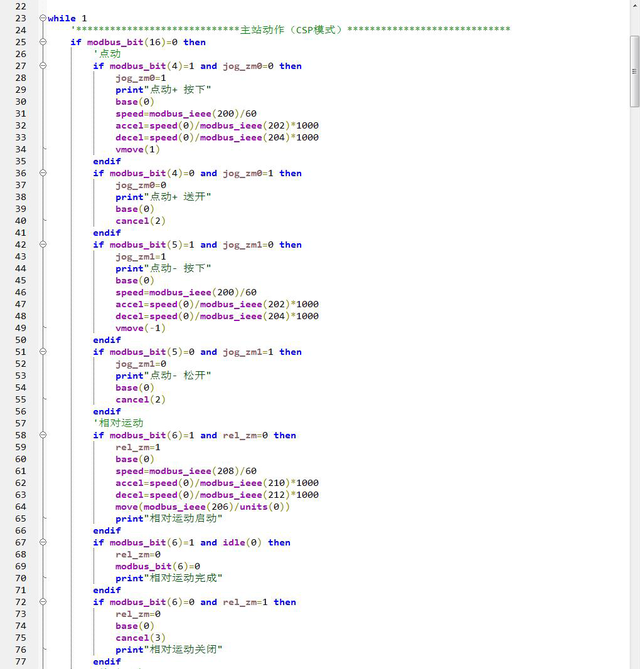
附录: EtherCAT总线运动控制器(主站)和EtherCAT总线驱动器(从站)的程序。
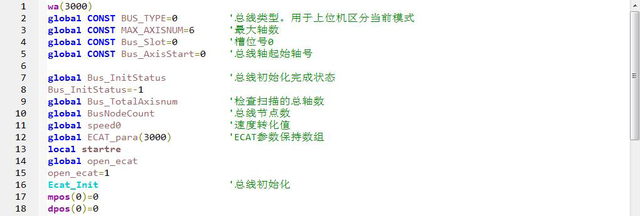
定义EtherCAT总线变量▼
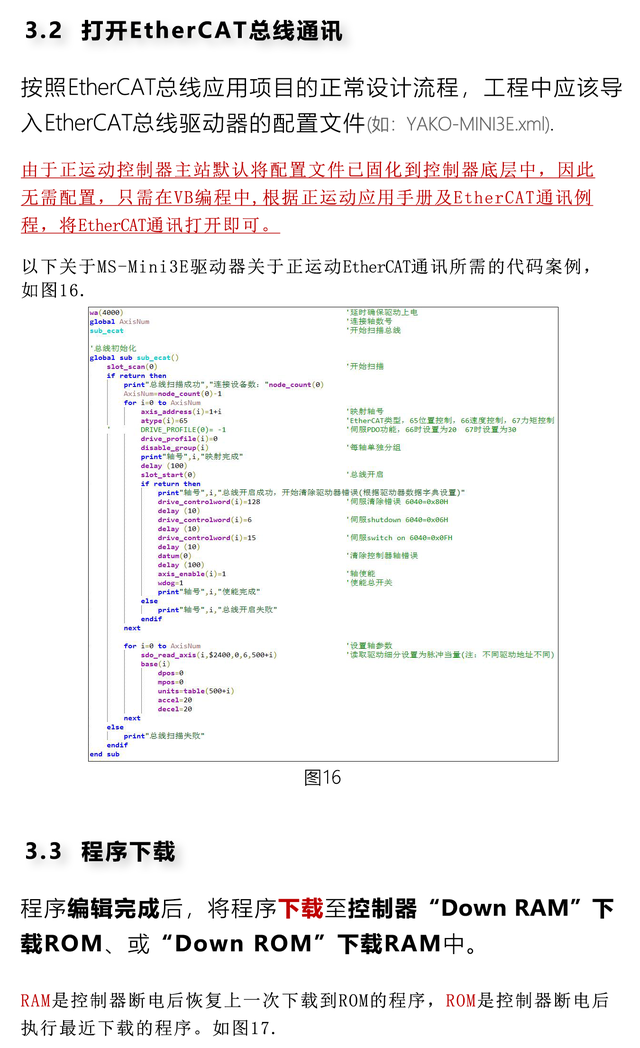
打开EtherCAT总线通信▼
定义运动变量▼
主站CSP模式应用案例▼

从站速度(PV)模式应用案例▼

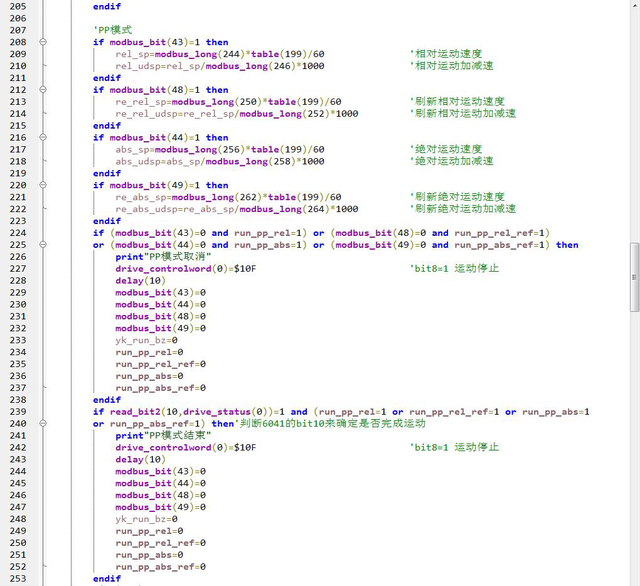
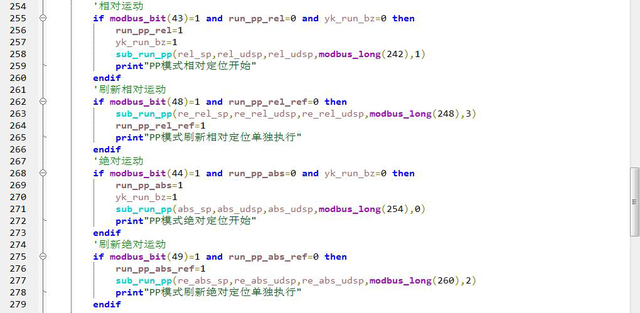
从站位置(PP)模式应用案例▼
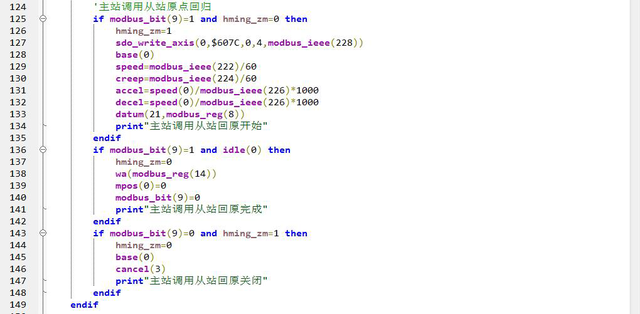
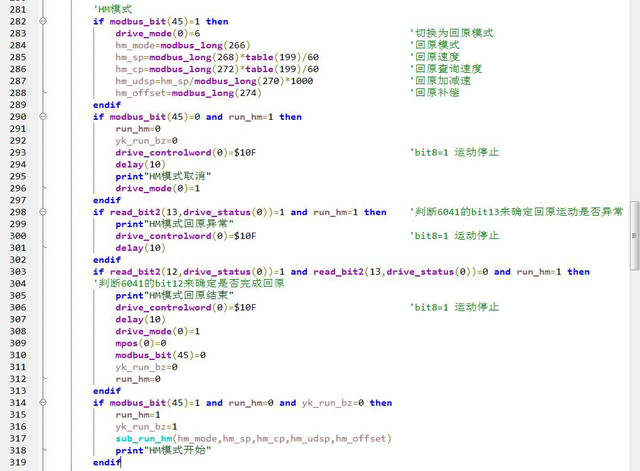
从站回零(HM)模式应用案例▼
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
关键词:
研控
正运动
EtherCAT总线
控制器
连接步骤
相关推荐
[转帖]基于PSD系列芯片的单片机电路设计
PID控制器的参数整定及其应用
镍氢/镍镉电池快速充电控制器AIC1783充电电路
大容量Flash型AT91系列ARM核微控制器
带光隔离的计算机彩灯控制器
SPT1141/1151多功能开关控制器的典型应用电路
英伟达下一代车载自动驾驶域控芯片在合肥首次成功下线
两轮探测机器人
如何配置控制器局域网络位时序实现系统性能优化?
高电压与低电压的控制器的测量
如何准确监测两个不同量程的负载电流?
Microchip低成本带CAN控制器的单片机PIC18F66K80
高功率因数、高效率电子镇流器控制器ML4831
Microchip推出高性能第五代PCIe®固态硬盘控制器系列
LED数显超声波测距控制器制作说明(显示分辩率I厘米)0579-2389842
研华携手生态伙伴打造多元GMSL摄像头方案,助力AGV/人形/工业机器人加速发展
电话信息智能控制器问世
系统温度精准控制“指南”
PID控制器
我需要T6963C控制器在LCD上的典型应用的详细资料
基于IAP15F2K61S2的蓝牙无线智能小车
NE5565电子镇流器控制器
TechInsights 拆解:看看华为的 MDC Pro 610 ADAS 控制器成本如何?
基于onsemi NCP681的图腾柱 PFC 控制器的AC/DC医疗级600W适配器
这两款控制器打开探索工业应用边缘连接的未来之门
安全设计降压前置稳压器,为汽车电源保驾护航!
工业用控制器
多功能模型用控制器
永磁无刷直流电机数字式控制器
在各种负载条件下保持高效率的电源控制器