UR机械臂上位机开发

随着人工智能、虚拟现实、大数据、物联网等技术的发展,机械臂可以作为执行工具去做各种各样的事情。

出于行业应用需要,一些科研领域用户希望用上位机替代示教器来控制UR机械臂,而这往往会花费不少时间和精力。为解决这一问题,我们为UR用户提供上位机开发服务,即基于PC端采用上位机软件控制机器人运动交互,取代传统的示教器。包含SDK,demo示例,以及指令列表,根据不同需求定制化模块。
• 移动模块
• 通讯模块
• 设置模块
• 显示模块
• 远程界面
UR机械臂提供丰富的通讯端口,用来和上位机进行通讯。通过不同的端口可以实现不同的控制功能,从而实现上位机控制。
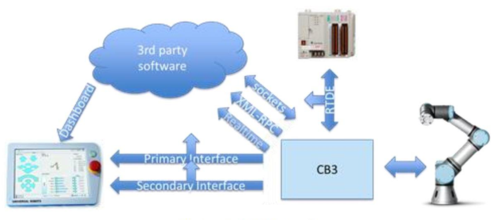

通过以上端口既可以获得机器人的信息又可以控制机器人的运动。

根据以上接口进行封装打包,可以在任意编程平台上搭建组合自己的上位机控制软件。该上位机软件以 C#为例进行展示,用户可以根据自己的需求,参照提供的文档、脚本代码、指令解析文档,将其转化为所需的平台。
此外,我们提供上位机编程培训,对于通讯端口29999,30001,30002,30003,进行讲解,以及Demo示例。涵盖:通讯模块——能够使用29999和30003端口通讯,并做周边拓展。
UR上位机开发服务价值
1. 大大降低研发成本,减少人员开支;
2. 减少试错概率,缩短开发周期,快速搭建原型机;
3. 让客户更加专注于自己擅长的领域
The end.
舜若科技整理并原创。转载请注明出处。
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
关键词:
相关推荐
:)哈哈,我升到高级工程师了
CAN-bus 发展史
英特尔至强6处理器:以卓越性能与能效,驱动数据中心整合升级
开发如走钢丝:平衡机器人技术的创新与安全
Ceva和罗德史瓦兹(Rohde & Schwarz)合作,率先推出测试解决方案以配合即将推出的蓝牙OTA UTP试模式
《财富》前1000公司被警告 勿在内部进行P2P盗版
低噪声 μModule DC/DC 转换器简化了 EMI 设计
绿芯将在2025嵌入式展会上展示其高耐久性工业级固态硬盘和存储卡产品
OPA2111构成的均衡立体声前置放大电路
Microsemi:新战略,新希望
CAN-bus 现场总线基础方案--工具篇
采用ZXCD1O00/150WD类功放电路
CAN-bus 现场总线基础方案--通讯篇
Microsemi 产品介绍
微软OFFICE 11对旧版OS说不
LM380构成的2W音频功率放大器
苹果史上外观变化最大:iPhone 17系列渲染图曝光
Gartner:三分之一的CDAO将评估数据、分析和AI价值视为首要挑战
NAB磁头前置放大器(OPA37)
业界最高功率的 D 类放大器 - TAS5630/1
无线网络应用走进家庭 Wi-Fi 市场将会升温
e络盟社区联合TDK发起超声波传感器挑战赛
SanDisk新存储卡小如耳环可存1GB数据
最新全球半导体设备厂商排名Top10
智元灵犀X2机器人:骑自行车 做闺蜜 缝葡萄样样拿手
CANBridge用户手册
QNX推出通用嵌入式开发平台,加速开发者创新
为中国市场度身定制的RF 收发器 – CC1100E
CANBridge数据手册(英)
采用TPA2000D22WD类功放电路