FPGA开源系列(1)------PPM基带系统设计之调制部分

PPM的基本原理就是将码元信息表示在一个帧时间段内的某个时隙上,若一个码元由n比特组成,该帧时间段含M个长度为t的时隙,则2^n=M,通常帧时间段还包含一个保护时间间隔Tp ,则系统的比特率为n/(M*t+Tp)。在此就不作赘述,学术界有很多论文讲到它在通信中的优点。
在本设计中,为简化起见,不考虑保护间隔Tp,并设定M=4。首先,PPM基带系统分为调制和解调两部分,本文主要阐释调制部分的具体模块,解调部分会在后续系列中。
对于调制部分,可划分为串/并转换、四分频器、比较器、窄脉冲形成器、整形等5个模块。其中,串/并转换模块主要完成对输入比特流的二进制编码;四分频用于生成帧时间段内的4个时隙;比较器完成对上述两模块输出的高低对应位的匹配比较;窄脉冲形成器用于对比较器的输出做成型滤波,限制PPM脉冲的带宽,从而减小该PPM脉冲对相邻频带内的信号造成干扰;整形电路仅用D触发器实现,主要功能是锁存PPM窄脉冲,与时钟同步,从而避免竞争冒险现象。
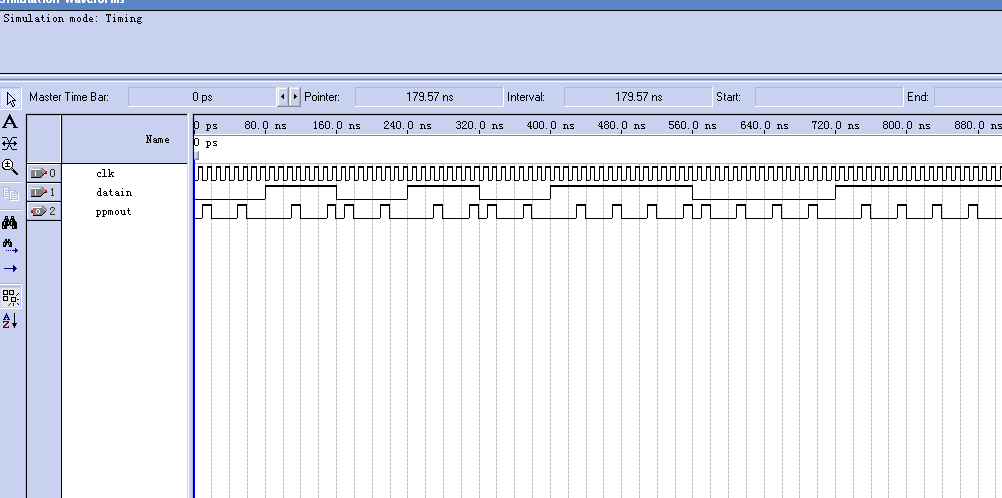
由于功能不是很复杂,省略了在ModelSim上做前仿真的环节,直接在QuartusII上做综合后的时序仿真,效果还可以,文末压缩文件中附有各个模块的Verilog源代码,PPM调制部分的顶层原理图以及后仿时序图,请网友们不吝赐教。
temp.rar
在本设计中,为简化起见,不考虑保护间隔Tp,并设定M=4。首先,PPM基带系统分为调制和解调两部分,本文主要阐释调制部分的具体模块,解调部分会在后续系列中。
对于调制部分,可划分为串/并转换、四分频器、比较器、窄脉冲形成器、整形等5个模块。其中,串/并转换模块主要完成对输入比特流的二进制编码;四分频用于生成帧时间段内的4个时隙;比较器完成对上述两模块输出的高低对应位的匹配比较;窄脉冲形成器用于对比较器的输出做成型滤波,限制PPM脉冲的带宽,从而减小该PPM脉冲对相邻频带内的信号造成干扰;整形电路仅用D触发器实现,主要功能是锁存PPM窄脉冲,与时钟同步,从而避免竞争冒险现象。
由于功能不是很复杂,省略了在ModelSim上做前仿真的环节,直接在QuartusII上做综合后的时序仿真,效果还可以,文末压缩文件中附有各个模块的Verilog源代码,PPM调制部分的顶层原理图以及后仿时序图,请网友们不吝赐教。
temp.rar
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
关键词:
相关推荐
新科2320型DVD机开关电源(UC3842) 电路
利用CPU和SVE2加速视讯译码和图像处理
三菱FX系列PLC教程 36 —— FX系列的取反指令
模仿猫咪撒娇 新型机器人「磨蹭」助舒压
强化定位服务 提高距离测量精度 蓝牙6.0技术探勘
EDW论坛精华集意见征求
三菱FX系列PLC教程 33 —— FX系列的传送指令
《E时代周报》报道:西祠收费大起底
以马达控制器ROS1驱动程序实现机器人操作系统
嵌入式网络模块TCP运行库参考手册
三菱FX系列PLC教程 35 —— FX系列的区间比较指令
任天堂称大部分游戏机生产年内将转至中国
嵌入式开发系统说明书(S3C44BOX的一些资料)
裕兴815型DVD机开关电源(TOP224) 电路
大电流、高性能降压-升压稳压器
UNO SPE扩充板,即插即用UNO R4实现超高数据传输、实时链接
MIT研发机器蜂 有望实现人工授粉
爱立信变革之舞
三菱FX系列PLC教程 32 —— FX系列的程序流向控制指令
飞利浦703型DVD机开关电源(UC3842A) 电路
万利达VCU2200型DVD机开关电源(TEAl522P) 电路
汽车微控制器技术为下一代车辆带来全新突破
嵌入式系统的C程序设计
以无线物联网系统监测确保室内空气质量
三菱FX系列PLC教程 34 —— FX系列的块传送指令及多点传送指令
新科2200型DVD机开关电源(TOP223) 电路
嵌入式图像采集系统的硬件设计
生成式AI为制造业员工赋能
Linux在中国乏善可陈 拿什么去捍卫领地
嵌入式网络设备的MAC及IP地址设置