基于ARM的汽车电子控制系统单元设计 (上)

随着电子控制系统单元(ecu)在汽车上广泛应用,汽车电子化程度越来越高。电控系统的增加虽然提高了汽车的动力性、经济性和舒适性,但随之增加的复杂电路,必然导致车身布线庞大而且复杂,安装空间短缺。同时,为了提高电控单元信息利用率,要求大批的数据信息能在不同的电子单元间共享,汽车综合控制系统中大量的控制信号也需要实时交换,不同功能电子控制系统单元间的数据通信变得越来越重要。因此对电子控制系统单元的设计提出了越来越高的要求,不仅要求通信网络应具有通信速率高、准确、可靠性高的特点,同时要求控制模块上应具有控制实效性高、空间小等优点。
本文采用了基于can总线技术,设计开发了应用于汽车网络系统中的电子控制系统单元。
1 电子控制系统单元can通信模块的设计
根据can通信原理,电子控制系统单元can通信模块硬件主要由can控制器、can驱动器及中心微处理器构成。传统的can通信模块采用51系列的单片机作为中心处理器,SJA1000作为can控制器,PCA82C250作为can驱动器。这种方案所占空间大,外围接口扩展局限,同时功耗高。本设计中,我们采用内嵌有can控制器的LPC2119和TJA1050总线驱动器构成电子控制系统单元的can通信模块。can通信模块硬件图如图1所示。
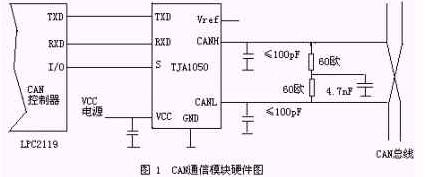
LPC2119内带有arm7内核,具有封装小、功耗低、多个32位定时器、4路10位adc、2路can以及多达9个外部中断等优点。TJA1050是PHILIPS公司生产的,用以替代PCA82C250的高速can总线驱动器。该器件提供了can控制器与物理总线之间的接口以及对can总线的差动发送和接收功能。对于由"弱"终端构成的端节点,TJA1050外围的电阻和电容能改善系统的emc性能。实践证明,采用LPC2119和TJA1050构造can通信模块,外围扩展能力强,空间小,同时改进电磁辐射(eme)性能和抗电磁干扰(emi)性能。
2 电子控制系统单元控制模块的设计
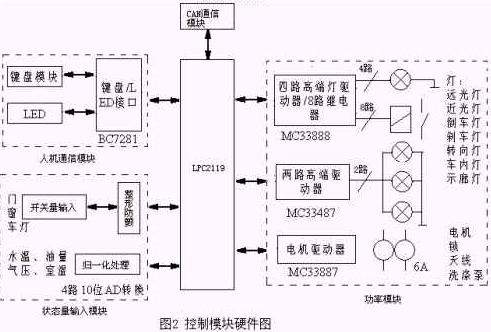
传统的"蜘蛛网式"控制模块,电路复杂,维修难度高。本设计中,我们采用功率模块、人机通信模块、状态量输入模块的结合,构造出电子控制系统单元控制模块,提高了整个系统的可观性和实效性。控制模块硬件图如图2所示。
2.1 功率模块
考虑到汽车功率负载大及LPC2119的i/o口驱动的局限,系统中采用功率模块作为中心微处理器与功率负载之间的桥梁。
设计中,我们采用摩托罗拉公司生产的mc33888功率器件控制远光灯、近光灯、倒车灯、刹车灯。mc33888内部集成有四路高端灯驱动器和8路继电器或发光二极管驱动器,是一个可控制网络,具有在板诊断、与微控制器通信报错能力及故障软化等优点。考虑到车内灯和示廊灯的功率相对比较大,我们采用mc33487功率器件进行控制。mc33487内部集成两路带有电流感应的20毫欧姆高端驱动器,电流输出4.5a.感性负载以及大电流的短路保护是整个设计的难点。mc33887具有功耗低、等待模式下电流25微安、输出电流超过8安的短路关断等优点,所以系统采用mc33887功率器件对电机、锁、天线、洗涤泵进行控制。
2.2 人机通信模块
为了提高驾驶员和乘客的舒适性、安全性,整个系统必须在人和机器之间建立良好的人机通信模块。BC7281、键盘模块及外围的led之间的结合,构造出人机通信模块。BC7281是比高公司推出的16位数码管显示及键盘接口专用芯片。该芯片通过外接移位寄存器(74HC164、74LS595等)可控制16位数码管或者128只独立的led。BC7281的驱动输出极性及输出时序均可通过软件进行控制,从而和各种驱动电路配合,适合任何尺寸的数码管。
通过人机通信模块,人的意识能够为机器所识别,同时机器也可以将一些相应的状态信息反馈到led或者lcd上,达到人机通信的可视化效果。
2 3 状态量输入模块
状态量输入模块主要是将一些人为操作的效果(如大灯开关、转向灯开关)、车身状态(如车门、窗的开关)及内部状态信息(如油量、水温)反馈给中心处理器。中心处理器对反馈信息进行分析处理,就可以准确判断本车所处的状况,并做出相应的操作。
外部状态信息可以分为开关量和模拟量。通过一系列外围电路(如整形防颤电路),我们将开关量转换成cpu可识别的0v和+5v高低电平。在模拟量处理上,先经过归一化处理电路,将水温、油量、气压、室温的变化转化为0v到5v之间电信号,然后通过LPC2119内嵌的4路10位ad转换器转换成相应的数字量。利用现有的can通信模块将这些数字量传输到驾驶员附近的电子控制系统单元,再经过d/a转换器,反应在仪器仪表上。
3 电子控制系统单元软件设计
对于LPC2119微处理器来说,can控制器完全是基于事件触发的,即在本身状态发生改变时,can控制器会将状态变化的结果告诉微处理器。因此中心微处理器可以采用中断的方式或者轮询的方式对can控制器作出相应的处理。完整的can固件编程层次结构图如图3所示。
各电子控制系统单元按规定格式和周期发送数据到总线上,同时根据需要各取所需的报文。对于接收数据,本系统采用中断的方式实现,一旦中断发生,即将接收的数据自动装载到相应的报文寄存器中。此时利用屏蔽滤波寄存器对接收报文的标识符和预先在接收缓冲器初始化时设定的标识符进行有选择地逐位比较,只有标识符匹配的报文才能进入接收缓冲器,那些不符合要求的报文将被屏蔽于接收缓冲器外,从而减轻cpu处理报文的负担。
各电子控制系统单元的应用层程序都不一样,但是通信模块的应用程序基本上一致,可分为can初始化、发送数据、接收数据。
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
相关推荐
验证是当前IC设计界的头等大事
康佳彩电T2983L、T2980H等机型开关稳压电源电路
据报道英特尔 NEX 部门剥离吸引了爱立信的兴趣,可能投资超过 1 亿美元
IC封装问题已成为IC发展的阻碍?
康佳中小屏幕“D”系列彩电开关稳压电源电路图
MAX3657 155Mbps的接收器的互阻前置放大器
高K值绝缘材料面临不稳定性的挑战
特斯拉寻求三星供应 A16 芯片—据报道用于超级计算机和机器人,而非汽车
基于PIC32的低成本图形解决方案
MAX2986电力线收发器
Microchip WiFi 模塊(MRF24WB0Mx系列) 的連線種類與方法—WiFi介紹与Infrastructure Mode
MAX3013 8 通道电平转换器
英特尔为 Nova Lake CPU 准备新的 Linux 支持
隔离电源和非隔离电源的区别,小白必读!
康佳彩电F2588A、T2563A、T2909A等机型开关稳压电源电路
MPEG-4流媒体著作权保护标准基本确定
康佳BT4301彩电主开关稳压电源电路图
MPLAB® X IDE 编译调试(下)
国产MCUGD32E235如何破局家电变频控制?全场景高能效方案拆解
STM32 心电图方案全解析:手把手教你开发医疗级心电监测设备!
硬件干货|RS485通信协议详解
生物签名认证为生物识别市场带来新机遇
MAX2640_MAX2641 超低噪音放大器
汽车电子的“心脏稳定器”:车规片状电感应用全景解析
变压器技术全景图:从电磁感应到平面革命
康佳镜面彩电P2987N、P2989N、P3492N等机型开关稳压电源电路
MAX2980电力线通信模拟前端
Microchip WiFi模塊(MRF24WB0Mx系列) 的連線種類與方法—AdHoc Mode的三種連線方式
与EMI滤波器“和谐共舞”
“Albertgreen”的LED显示HEX视频