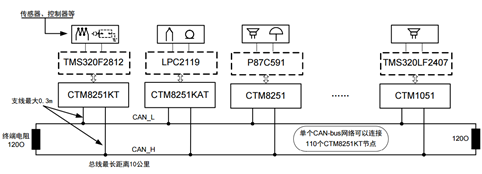
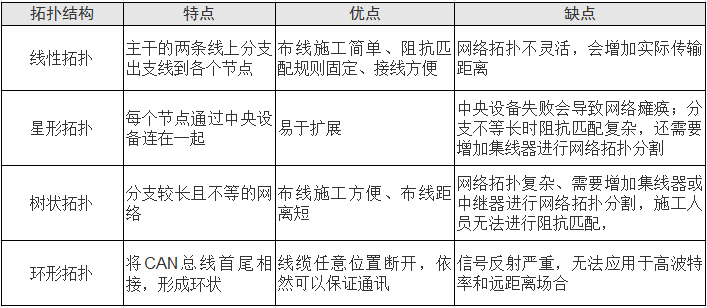
线性拓扑是CAN总线布线规范中最为常见的,如果采用了线性拓扑中的“T”型分支连接,按规定分支长度是不能大于0.3m的,需要更长的分支应该怎么办呢? 一、CAN拓扑分类 CAN (控制器局域网, controller area network)属于工业现场总线的范畴,是一种有效支持分布式控制和实时控制的多主异步串行通信网络。CAN网络的拓扑结构主要有线性拓扑、星形拓扑、树状拓扑和环形拓扑,这几种拓扑的结构的特点如图1所示:
图
CAN一致性测试中,有一项测试叫“CANL对地短路测试”,但是我们测试的时候发现被测设备有时候在对地短路时也能正常通讯,这是什么回事呢?
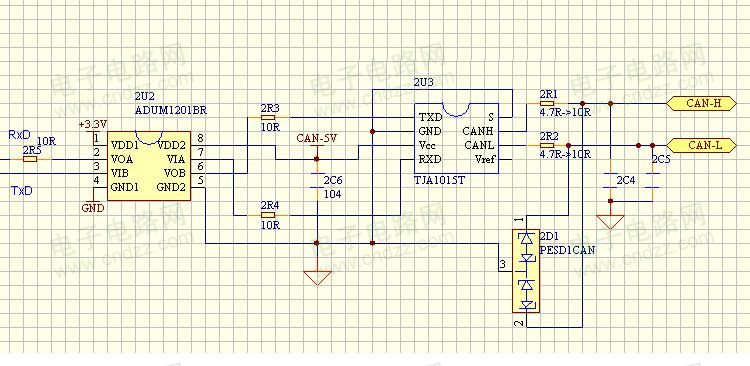
我们都知道CAN总线采用差分传输,这样可以极大的避免信号的反射和干扰,从而抑制共模干扰,也是CAN容错性能好的原因之一,CAN的波特率最大可以到1Mbps。根据波特率的大小我们把CAN总线分为单线CAN、低速CAN、高速CAN。
表 1 CAN 总线类型 CAN 的通讯
线性拓扑是CAN总线布线规范中最为常见的,如果采用了线性拓扑中的“T”型分支连接,按规定分支长度是不能大于0.3m的,需要更长的分支应该怎么办呢? 一、CAN拓扑分类 CAN (控制器局域网, controller area network)属于工业现场总线的范畴,是一种有效支持分布式控制和实时控制的多主异步串行通信网络。CAN网络的拓扑结构主要有线性拓扑、星形拓扑、树状拓扑和环形拓扑,这几种拓扑的结构的特点如图1所示:
图
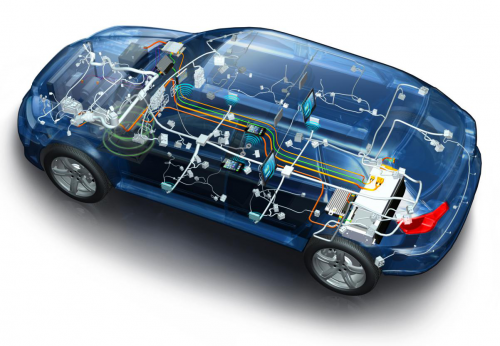
CAN BUS(Controller Area Network Bus)是汽车电子领域最核心的通信协议之一,由博世公司于20世纪80年代开发,旨在解决传统汽车线束复杂、可靠性低的问题。作为多主架构的串行通信总线,它通过统一的数字信号传输标准,实现了车内电子控制单元(ECU)间的高效协同,成为现代汽车智能化与电气化转型的底层基石。CAN BUS基于双绞线或光纤物理介质,采用差分电压传输机制:静态时两 [ 查看详细 ]