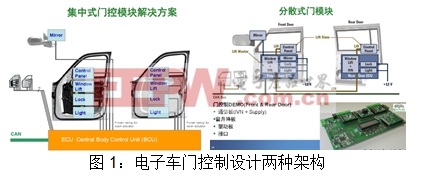
据IC Insights预估,到2030年电子产品在汽车整车中的成本比重会占到50%。汽车电子的不断发展,使得汽车的操控性、安全性、舒适性大大提高。然而随着汽车电子设备的不断增多,汽车系统设计复杂度也在不断提升。以车门控制系统为例,车窗升降、车门开关、后视镜折叠、水平与上下调节、电加热、转向灯、照地灯、安全灯、控制面板背景灯、按键、高级配置中的后视镜电防眩目等,功能要求越来越多,设计越来越复杂。为应对日趋复杂的汽车车门控制设计,全球领先的半导体生产厂商安森美半导体提供了丰富的器件选型及系统解决方案。
关键字:
IC 安森美 IVN CAN LIN
1 引言
RS232作为标准的计算机串行接口已被广泛使用,与此同时,随着现场总线技术的飞速发展,具有实时性好、可靠性高、结构简单等优点的CAN总线在测控系统中也越来越多地被采用,但由于两者的总线结构、通信协议及传输特点各不相同,因而给不同设备之间的连接带来诸多不便。因此,如何以最简单的方式实现CAN节点与RS232串行口的通信就成为工程实践中一个不可回避的问题。
本文采用典型的不具备CAN通信能力的AT89C51单片机作为微处理器,设计了一个简单、实用的通信转换模块。该通信转换模块具有体积小、结构简单
关键字:
AT89C51 CAN-RS232
高性能模拟与混合信号IC领导厂商Silicon Labs(芯科实验室有限公司, NASDAQ:SLAB)于2014年5月21日宣布推出旨在简化智能仪表无线连接开发的完整软件解决方案,适用于基于无线M-Bus标准的电、气、水和热等资源类智能仪表。Silicon Labs的无线M-Bus软件特别针对快速增长的智能仪表和智能电网市场,是对其行业领先的微控制器(MCU)、无线IC产品和开发工具套件的有力补充。
无线连接为许多智能仪表应用提供了可扩展且易部署的通信技术。基于欧洲标准EN13757-4的
关键字:
Silicon Labs M-Bus IC
摘要:CAN总线是一种应用广泛的实时性现场总线,提出了基于具有ARM7TDMI内核的32位微控制器的CAN总线智能节点设计方案。详细介绍了ARM控制(LPC2294)的特点、智能节点的结构以及系统软件设计,同时结合现场实际使用给出了硬件抗干扰措施。
关键词:CAN总线 ARM 嵌入式控制器
CAN(Controller Area Network)即控制器局域网,CAN总线是国际上应用最广泛的现场总线之一。它最早是由德国Bosch公司推出的,CAN通信协议是一种用于汽车内部测量与执行部件之间的数据通信协
关键字:
ARM7 CAN
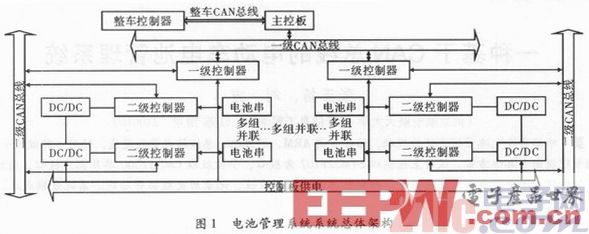
摘要 根据当今电池管理系统的现状,结合目前ARM、单片机、总线技术等的发展,针对一种锂离子动力电池组的监测管理提出了具体方案,设计主控板以STM32F107为核心,子控版以C8051F500单片机为核心,通过CAN网络进行通信管理,实现了电池充放电保护、抑制电池间的不一致性、记录历史数据等功能。系统兼顾成本,稳定性,精确度,实时性,具有良好的发展前景。
随着电池能源的广泛应用,石油资源的枯竭和环境污染,电动汽车以其节能环保的优势引起越来越多的重视,在电动汽车的研究和发展上,车载电池及其管理系统的研究与制
关键字:
STM32 CAN
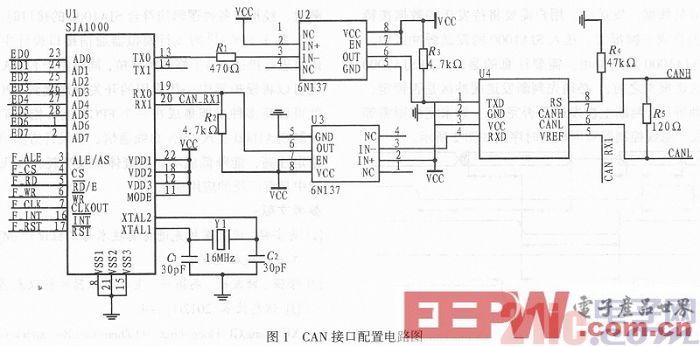
摘要:在飞行模拟器的设计中,为了使数据能够快速有效地在飞行模拟器的各个模块之间进行高速传递,提出了一种使用FPGA作为CAN总线节点结构中的核心处理器的设计方法,并完成了飞行模拟器通信接口的软硬件设计。采用Verilog HDL进行编程,能够完成对SJA1000总线控制器的有效读写。实际测试表明,相较于单片机作为处理器,本设计可扩展性好,易于修改和移植,能降低模拟器成本。
飞行模拟器是现代飞行员训练的必需设备,它是一种由计算机实时控制、多系统协调工作、能模拟真实飞行环境的模拟设备。相较于利用飞机的飞行训
关键字:
FPGA CAN
飞思卡尔半导体(纽约证券交易所:FSL)日前宣布,其业内首款面向普通市场的符合AEC-Q100标准的智能电池传感器已开始供货。该传感器在单一封装内集成了3个测量通道、1个16/32位MCU和1个CAN协议模块。 为了可以更好地支持面向汽车和工业应用的传统和新兴电池化学品,MM9Z1J638电池传感器测量了多项关键电池参数,以监控电池的健康状态(SOH)、电荷状态(SOC)和功能状态(SOF),从而进行早期故障预测。灵活的4单元前端架构可支持传统12V铅酸电池和其他新兴的电池应用,如14V堆叠锂电池、
关键字:
MCU CAN 飞思卡尔
如今,全球能源需求不断增加,加速消耗现有资源,促使各国政府制定更积极的节能目标和更严格的高能效标准,由此产生一系列的积极影响。如传统低能效的白炽灯照明正加速向LED照明过渡,传统电网向的智能电网生态系统过渡,传统汽车向电动汽车/混合动力汽车过渡,以及高能效电源和电机驱动越来越受重视。
以智能电网为例,它是完全自动化的分布式供电系统(从发电到用电),集成了双向通信智能电表及信息技术,旨在提升能效及可持续的电力服务。智能电网涉及电力、通信及应用等多个层次,涵盖家庭区域网(HAN)、邻域网(NAN)和广域网(
关键字:
安森美 M-Bus
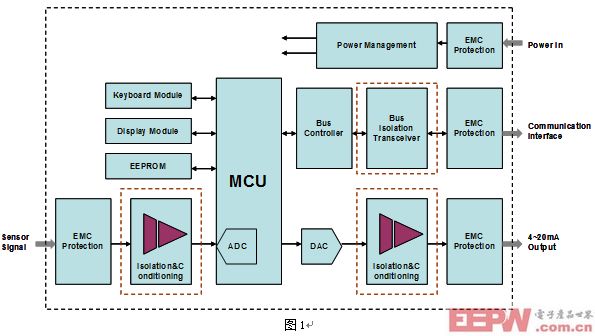
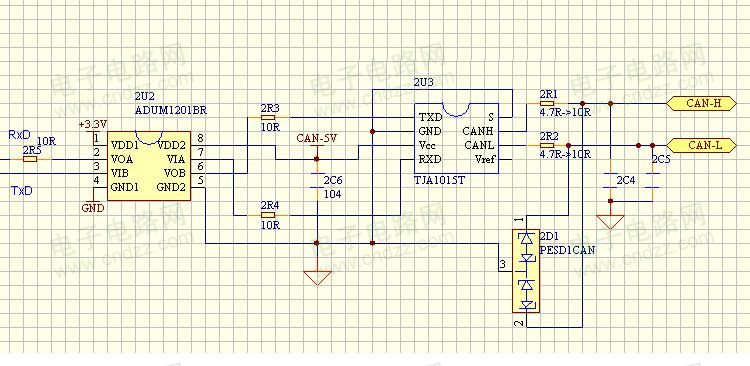
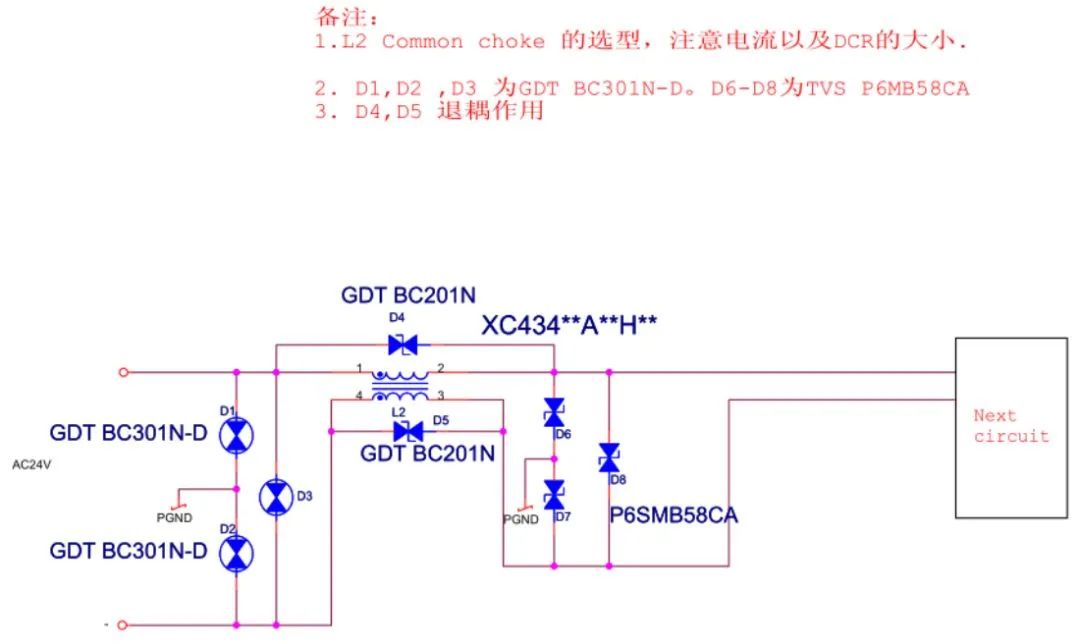
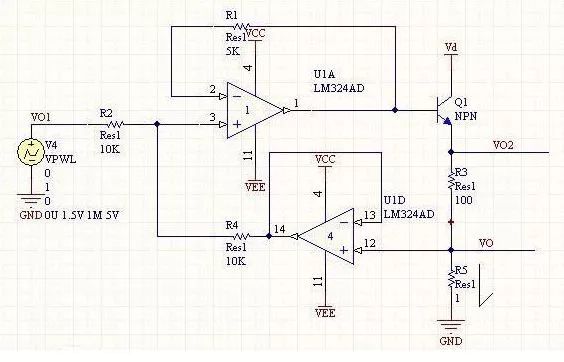
摘要:工业生产过程自动化系统中,存在多种类型的电气干扰,工业现场仪表在设计上要考虑各电气端口的干扰处理,这里针对工业仪表的模拟信号输入输出端口的信号抗干扰处理推荐了隔离变送器的解决方案,针对工业仪表的通信总线接口的抗干扰处理推荐了总线隔离收发器的解决方案。 一、 引言 生产过程监视和控制要用到多种自动化仪表、计算机及相应执行机构。过程中的信号既有微弱到毫伏级的小信号,又有数十伏的大信号,甚至还有高达数千伏、数百安培的信号要处理。从频率上讲
关键字:
传感器 信号隔离 隔离放大器 隔离变送器 CAN
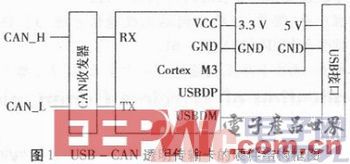
摘要:为了建立良好的CAN总线网络通信人机界面,可以通过通信协议的转换和数据的透明传输,使PC机通过USB接口接入CAN通信网络,成为CAN总线网络的一个通信节点,方便对CAN通信网络的监控和管理。
1 技术背景
近年来,随着工业场合自动化技术的不断更新,工业现场的数据采集、数据传输、设备控制已经成为电子工程师研究的重要课题。为了建立良好的CAN总线通信人机界面,可以通过通信协议的转换和数据的透明传输,使PC机通过USB接口接入CAN通信网络,成为CAN总线网络的一个通信节点,方便对CAN通信网络的监
关键字:
ARM USB-CAN
摘要:浮点型DSP以丰富的外设,较高的主频在工业控制领域得到广泛的应用,CAN总线设备构成的现场总线与以太网构成的高速通信网络已成为工业控制领域的发展趋势。介绍了一种基于的CAN总线与以太网互联系统的设计方法,给出了系统各组成部分的硬件及软件的设计与实现。控制部分采用TI公司的TMS320F28335,CAN总线接口模块采用TI公司的0,以太网接口模块控制芯片采用Realtek公司的RTL8019AS。该设计具有可扩展性好和性价比高的优点。
0 引言
工业现场设备复杂化,单一的串行通信使系统越来越复杂
关键字:
DSP CAN
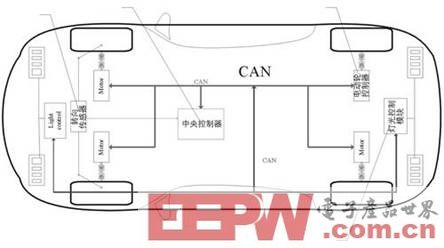
伴随着电动汽车的发展,CAN总线通讯技术应用越来越广泛,它可为纯电动汽车上四轮独立驱动控制,以及刹车防抱死系统(ABS)、电子稳定装置(ESP)等主动安全系统的实现提供便利。
在设计CAN总线通信系统时,总要面临着CAN数据的诊断与分析问题,不能解决该问题,便不能完成设计。本文基于Kvaser Leaf Professional HS这一USB_CAN工具,借助于Visual Basic环境,在PC机上开发出数据分析系统,并在该分析系统与四轮独立驱动电动车电机控制板之间实现了CAN通信。通过对CAN总线
关键字:
四轮驱动 CAN
USB(Universal Serial Bus)是一种通用串行总线。随着计算机技术的发展和广泛应用,人们对串行总线提出了更高的要求。因此,开发一种兼容低速和高速的技术,从而为广大用户提供一种可共享、可扩充、使用方便的串行总线已成为众多厂商的共同目标。
USB总线就是一种新型、快速、双向、同步传输、并可以热插拔的数据传输总线,它满足了人们对总线易用性、扩展能力强和低成本的要求,因此,USB在PC外设领域的传输速率从1.5Mbps的低速和12 Mbps的全速提高到如今的480 Mbps的高速数据传输。目前
关键字:
USB CAN
广州虹科拟举办CAN总线的培训班,欢迎各位感兴趣的朋友报名参加,我们期待您的参与! CAN总线培训班 CAN(Controller Area Network,控制器局域网)是国际上应用最广泛的现场总线之一,最初CAN被设计作为汽车环境中的各电子控制装置ECU之间传输信息的控制网络。当今CAN的应用已不再局限于汽车行业,而向过程工业、机械工业、机器人、数控机床、医疗器械和传感器等领域发展。随着汽车网络通讯技术的发展,针对电子控制系统(ECU)的诊断技术也日臻完善,与之相关的ISO
关键字:
虹科 CAN CiA CANopen EtherCAT PowerLink
广州虹科与CiA国际用户与制造商联合组织诚挚邀请您参加CAN/CANopen培训班。该培训班是针对希望了解CANopen概况及其所支持的技术情况的开发工程师,系统集成人员。该CANopen的培训课程也适合于公司技术决策者,可以了解CANopen是否能够满足其应用技术要求相关的通讯。 Speakers/讲师 Mr. HolgerZeltwanger, CiA’s president /HolgerZeltwanger先生, CiA国际用户与制造商联合
关键字:
虹科 CAN CiA CANopen EtherCAT PowerLink
can bus介绍
CAN BUS(Controller Area Network Bus)是汽车电子领域最核心的通信协议之一,由博世公司于20世纪80年代开发,旨在解决传统汽车线束复杂、可靠性低的问题。作为多主架构的串行通信总线,它通过统一的数字信号传输标准,实现了车内电子控制单元(ECU)间的高效协同,成为现代汽车智能化与电气化转型的底层基石。CAN BUS基于双绞线或光纤物理介质,采用差分电压传输机制:静态时两 [
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473