- 1 引言
晶体硅太阳电池能够取得高效转换效率的原因主要是基于表面钝化、湿氧氧化等技术的应用。新技术的开发与运用同时也极大地促进了太阳电池的商业化发展。在过去的10年,全球太阳电池的生产以年平均30%的速
- 关键字:
均匀 研究 气氛 扩散 太阳 电池 晶体
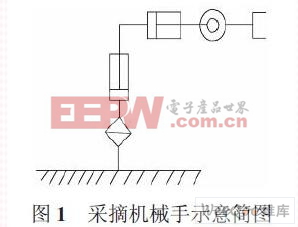
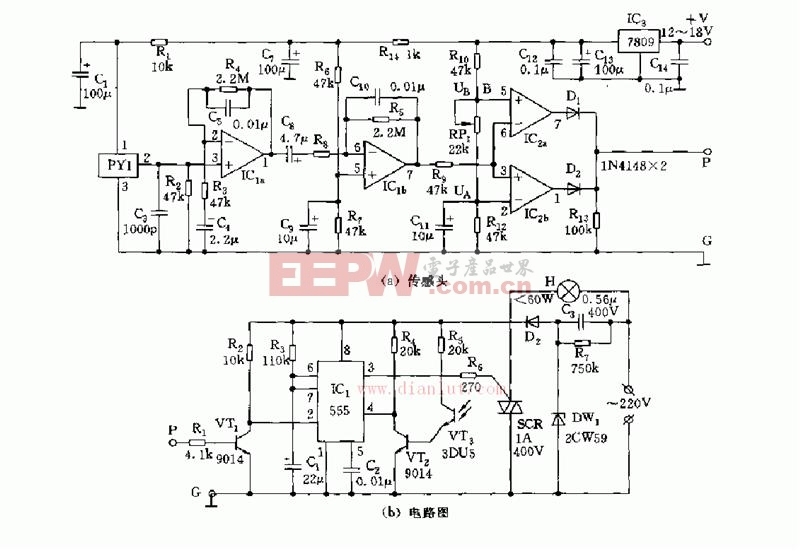
- 基于ARM 的浆果采摘机械手运动控制研究, 随着计算机和自动控制技术的迅速发展,农业机械将进入高度自动化和智能化时期。浆果采摘机器人的应用可以提高劳动生产率和产品质量,改善劳动条件,解决劳动力不足等问题。浆果采摘机器人主要由机械手及末端执行器
- 关键字:
控制 研究 运动 机械手 ARM 采摘 基于 ARM
- 基于ARM的嵌入式服务机器人控制器的研究,1 引言
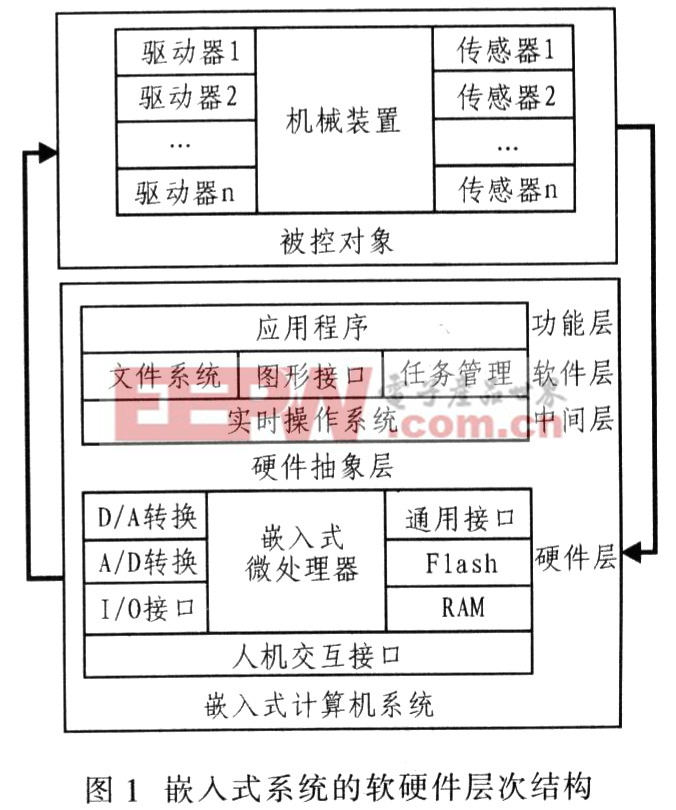
随着人口老龄化进程的加快,更多老年人,尤其是地震和疾病致残的残疾人,都需要照顾。基于此,这里提出一种基于ARM的嵌入式服务机器人控制系统设计。该服务机器人的控制系统是机器人的神经中枢,因而其设
- 关键字:
控制器 研究 机器人 服务 ARM 嵌入式 基于 ARM
- 0 引言
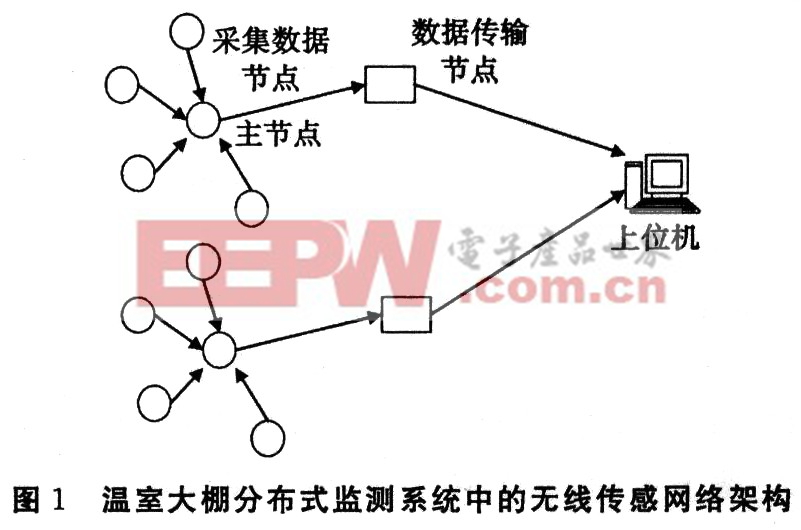
目前我国北方大部分地区都有温室大棚,而且温室大棚也随着自动化监测技术的进步来到了现代化远程监控的时代,农产品价格的提升使得温室大棚采用进一步的先进技术成为可能,我们在此背景下将ZigBee技术用
- 关键字:
系统 研究 监测 温度 ZigBee 技术 基于 ZigBee
- 0 引言
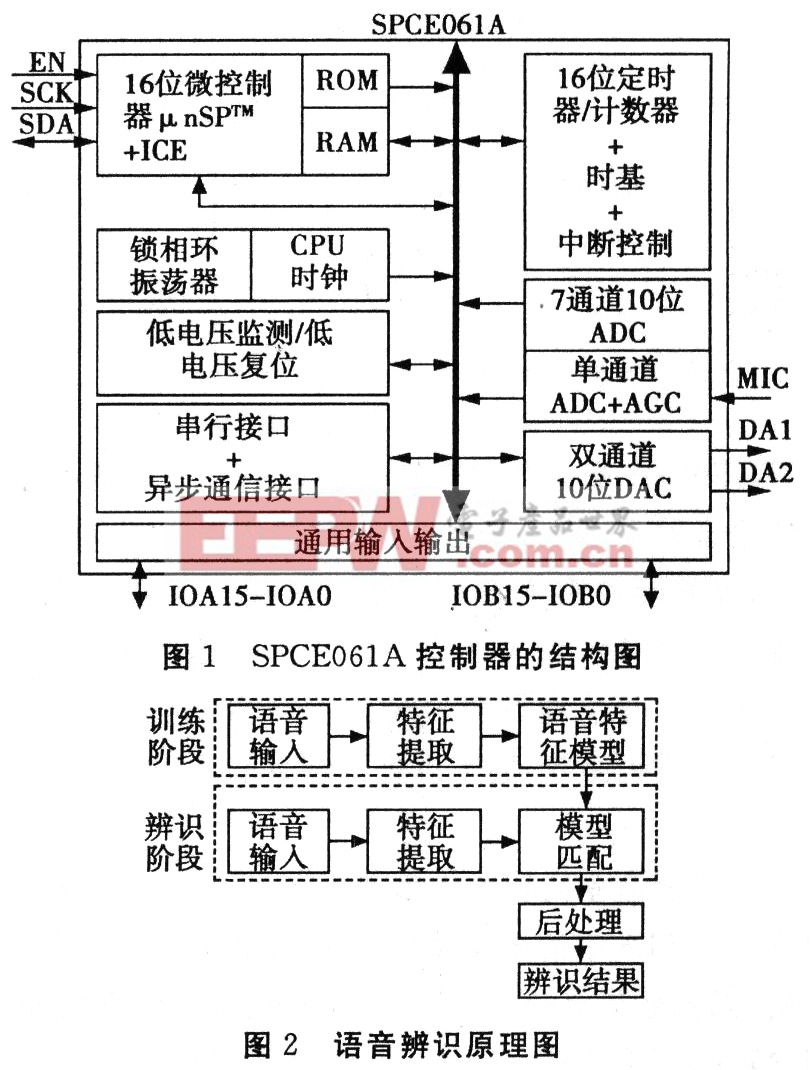
随着科技的发展,智能设备大量涌现,其中智能汽车作为典型代表之一,对其进行研究开发也相当普遍,当然人与这些智能化设备之间快捷可靠的交互方式很多,其中语音辨识技术以其独特的趣味性成为了人与智能
- 关键字:
辨识 系统 研究 语音 机器人 SPCE061A 智能 小车 基于

- 0 引言
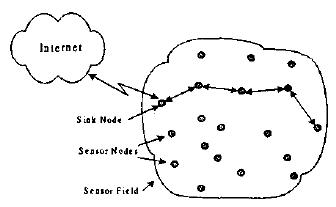
无线传感器网络由大量高密度分布的处于被观测对象内部或周围的传感器节点组成、其节点不需要预先安装或预先决定位置,这样提高了动态随机部署于不可达或危险地域的可行性、传感器网络具有广泛的应用前
- 关键字:
研究 体系结构 网络 传感器 无线 传感器
- 0 引言
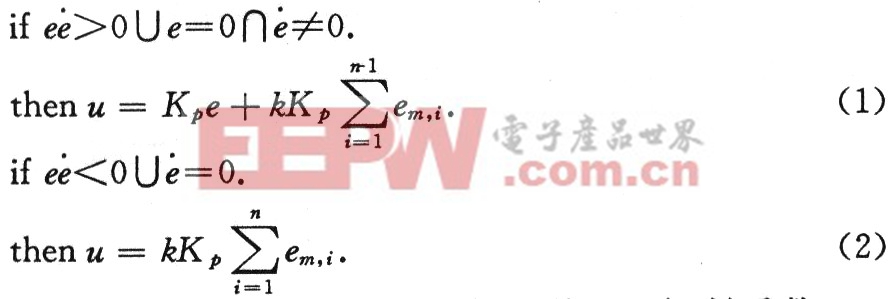
积分作用从某种意义上来说是人的记忆功能的模拟。对人而言,记忆功能具有某种选择性;在控制中,人总是有选择地记忆有用的信息而不记忆无用的信息。根据这一发现,周其鉴于1983年提出了著名的仿人智能积
- 关键字:
系统 研究 时滞 智能控制 改进 新型
- 0 引言
由于臭氧发生片负载性质呈电容性,双高变压器的高压线圈呈电感性,连接在一起构成谐振回路,谐振回路都有自己固有的谐振频率,只有在固有的谐振频率下臭氧发生片才能获得最大的能量。另高压线圈存在分布
- 关键字:
电源 研究 设计 高压 高频 负载 中小 功率 容性
- 0 引言
Mesh网起源于海湾战争时期美国的军事领域,作为一种新型的公共无线城域网解决方案,已经在美国等地被广泛用于市政、公共安全、教育、医疗、物流等领域。它提供持续的连接,并且当链路中断或者阻塞时可以
- 关键字:
相关 研究 MAC 网络 Mesh 无线 无线

- 0 引言
遗传算法,主要靠种群基因型的多样性提供进化机会,产生不断进化的效果。依据模式理论,遗传算法的搜索,是对隐含在编码串内的模式抽样和编码串间的模式重构的过程,存在隐含的并行性。本文对遗传算法操
- 关键字:
设计 应用 研究 优化 电路 算法 PFC 控制 遗传
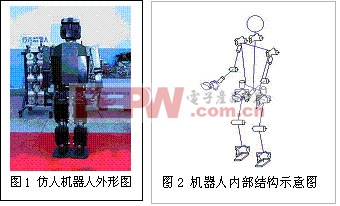
- 提出了一种以CAN总线为通信工具,DSP芯片为控制器的主处理器和双位置传感器的反馈结构,其配合主控计算机和底层控制器双层反馈的控制方式,可适于仿人步行机器人的分布式运动控制系统.整个控制系统结构灵活、功能强大、工作稳定可靠,可以显著提高仿人机器人的运动性能.
- 关键字:
运动 控制系统 研究 机器人 传感器 CAN 总线 基于 CAN
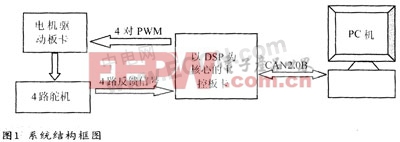
- 本文设计了一种基于CAN通信总线的新型舵机控制器。该控制器考虑了谐波传动的随速度波动和低阻尼特点,以提高舵机系统控制品质为目标,采用增量式分段PID算法产生PWH信号,对舵机随动系统进行实时精准控制,并通过CAN2.0总线接口实现了微型计算机与CPU之间的实时变量传送,方便了程序的调试。测试结果表明,该控制系统具有抗干扰性能好、控制品质优等特点。
- 关键字:
控制器 研究 路舵机 总线 CAN 基于 CAN

- 本文所设计实验,已经考虑较苛刻的时间及环境闪素,能说明整个系统具有良好的实时性。该实时控制方案的可行,有效降低了双臂单腿跳跃机器人控制系统的开发难度和成本,是关键的阶段性成果。
- 关键字:
控制 技术 研究 实时 机器人 单腿 跳跃 双臂 CAN
- 介绍基于STC89C52RC单片机实现非标准交流伺服电机控制的一种方案,提出一种基于控制继电器的闭合、断开而达到控制脉宽的大小。通过硬件平台的搭建和软件程序,实现闭环控制非标准交流伺服电机滑动磁块的位移,以此控制磁场变化,达到控制电机转速的目的。该方案在伺服电机转速精准的控制中得到了成功的应用,并且控制过程非常平稳,定位精确度很高,满足了工业现场的需要。
- 关键字:
转速 控制系统 研究 电机 伺服 单片机 交流 基于
研究介绍
您好,目前还没有人创建词条研究!
欢迎您创建该词条,阐述对研究的理解,并与今后在此搜索研究的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473