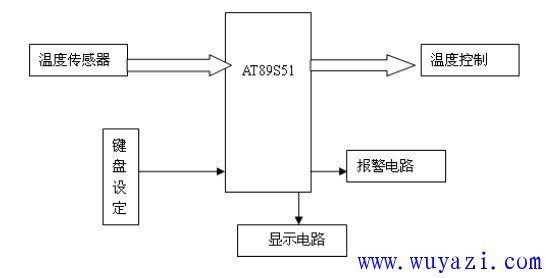
- 生产过程现场参数的变化情况直接反映生产情况, 所以及时有效地获得现场参数显得尤为重要。目前, 我国各油田的井口数据主要由人工抄表的形式获得, 尤其在边远地区, 其劳动强度非常大, 成本也很高,数据的实时性差, 数据
- 关键字:
自动 巡检 系统 参数 现场 无线 技术 基于 无线数传 自动巡检 数据管理 PCC
- 在最近一些机器人竞赛中,对于机器人的寻线行走,除了要求精确之外,对机器人寻线速度也提出了很高的要求,速度往往成为某些比赛制胜的关键。在最近教育部推出的全国大学生智能汽车大赛中,更是将寻线速度定为比赛的
- 关键字:
设计 实现 机器人 高速 视觉 基于 移动机器人 单片机 视觉 寻线
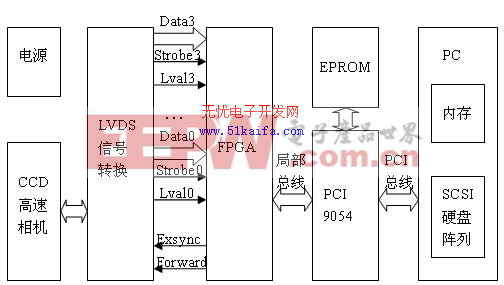
- 基于PCI总线的高速CCD图像存储系统设,1 引言侦察与监视在军事斗争中的地位举足轻重。在各种侦察/监视技术中,航空侦察占有重要的地位,可见光侦察是一种重要的侦察形式,无人侦察机显示出了广阔的发展前景,现代科学技术的发展为现代航空侦察与监视技术带
- 关键字:
图像 存储 系统 CCD 高速 PCI 总线 基于 PCI总线 CCD 图像存储
- 基于Xenomai的实时Linux分析与研究,Linux操作系统具有开源、稳定和支持多平台的特点,非常适合于嵌入式系统开发。本文分析了Linux在硬实时方面的不足,详细介绍了Linux的一种硬实时解决方案――Xenomai。分析了Xenomai的Adeos构架基础;借助S3C2410平台的Xenomai实现,说明了其用户层实时实现的关键;还介绍了Xenomai支持多种RTOS的API构架和用户层实时程序实例。
- 关键字:
分析 研究 Linux 实时 Xenomai 基于 驱动器
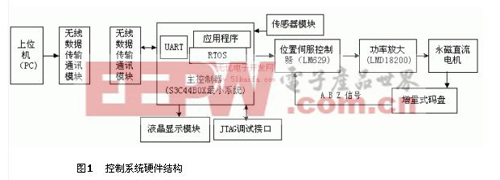
- 基于ARM+μc/os Ⅱ的教学机器人控制系统设计与实现,1.引言近年来随着人工智能技术、计算机技术等相关技术的发展,对智能机器人的研究越来越多。在教育领域,许多院校已在学生中开设了机器人学方面的有关课程。为了满足机器人学方面的有关课程教学示范和实验教学的需求
- 关键字:
控制系统 设计 实现 机器人 教学 ARM c/os 基于 机器人 ARM UCOS 伺服
- 前言 线切割加工技术(WEDM)在众多的工业生产领域如模具制造业、汽车制造业、航空航天制造业等起到了重要的作用。要制作一台省略其次要结构与技术环节的低速走丝电火花线切割机床样机,其中包括两项关键技术:1
- 关键字:
脉冲 电源 设计 机床 线切割 DSP 应用 基于 DSP 切割机床 脉冲电源
基于介绍
您好,目前还没有人创建词条基于!
欢迎您创建该词条,阐述对基于的理解,并与今后在此搜索基于的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473