- 1 引言
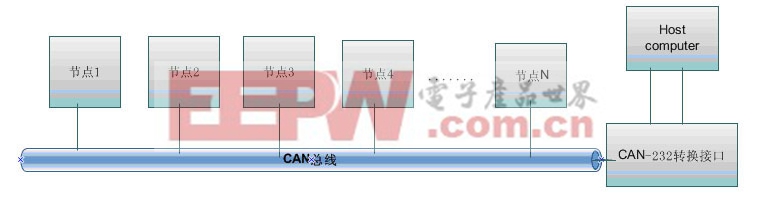
在常规自动控制系统中,传感器与执行器是独立接线的,多个传感器和执行器构成的系统需要大量导线。通信总线应用到测控系统中,不仅能节省大量的导线,而且可提高系统的可靠性。已被广泛采用的
- 关键字:
控制系统 电梯 PLC 西门子 基于
- 1 LonWorks技术特点及系统结构
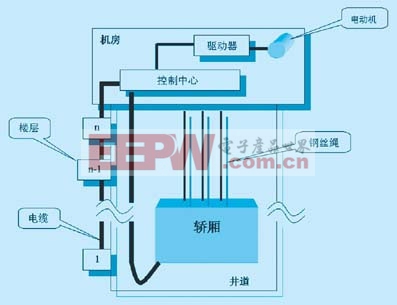
LonWorks控制网络技术,是目前控制领域中应用最广的通用控制总线技术之一。该技术提供一个平坦、对等式的控制网络架构,给各种控制网络应用提供端到端的解决方案。如今,许多知名
- 关键字:
机房 监控系统 总线 现场 Lonworks 基于
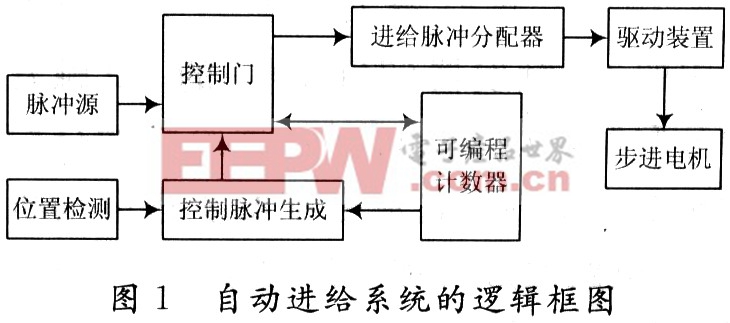
- 自动进给控制系统是数控机床等现代加工设备的重要组成部分,以中规模数字集成计数器IC74191为核心,利用EDA软件对数控机床自动进给系统研究和设计,给出自动进给控制系统的控制电路,分析了控制信号的传输方式和过程;利用虚拟逻辑分析对数控机床自动进给系统进行了仿真实验,结果完全符合设计要求。
- 关键字:
设计 实现 控制系统 自动 IC74191 基于 转换器
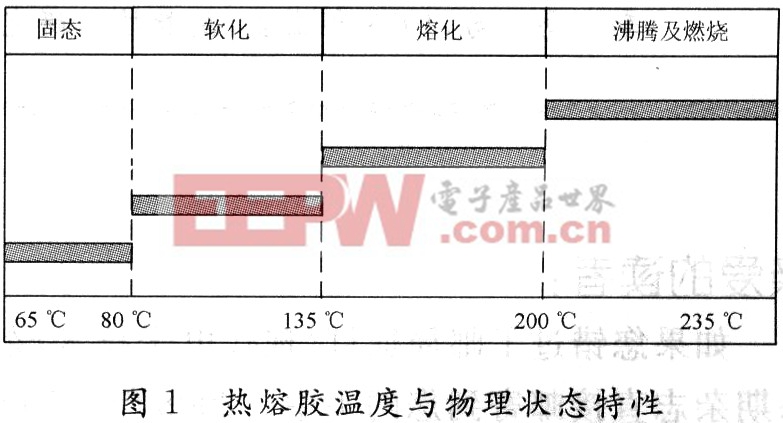
- 根据纸箱粘箱中对喷胶精度和速度的要求以及热熔胶的温度特性,利用PLC替代传统的继电器接触器控制系统,设计一种基于三菱FXIN-40MR的适用于纸箱封箱的PLC控制喷胶系统,给出系统的构成及控制的实现方法。在分析影响喷胶速度与精度控制因素的基础上,利用最小二乘法消除因喷胶头控制电磁阀滞后开闭对喷胶准确度的影响,使系统可实现单个纸箱多个方位的同时精确喷胶。
- 关键字:
设计 控制系统 PLC 基于 转换器
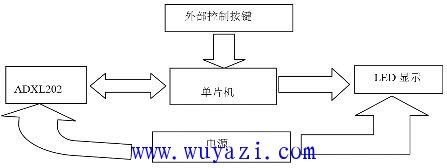
- 根据一些社会现象,设计一种基于单片机的节能断电保护电路。该电路以单片机为控制核心,辅以相关的电子电路,利用人体红外传感器检测有无人在,或利用相关传感器检测计算机是否关机,当办公室、教室、学生宿舍无人时,或计算机关机但没断电时,延时一定的时间后,会自动切断电源,起到节能与断电保护的作用,下一次需要使用时,只要按一下开关即可恢复供电。
- 关键字:
保护 电路设计 断电 节能 单片机 基于
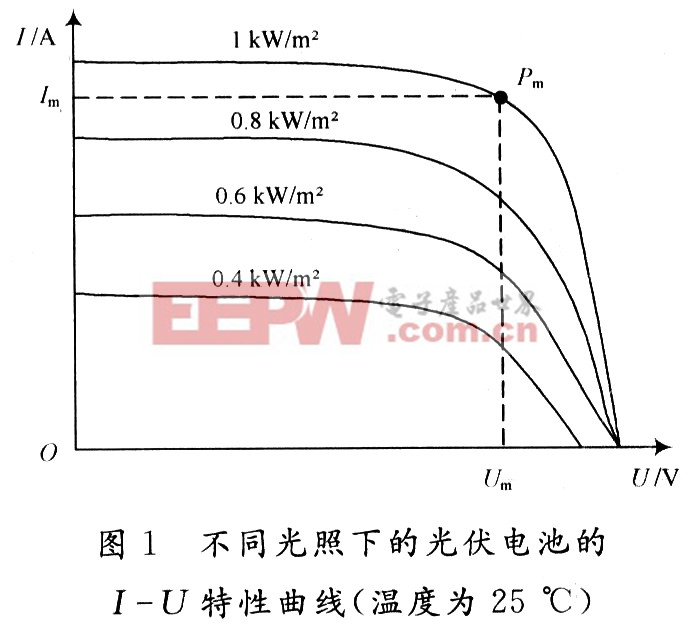
- 分析了太阳能光伏发电过程中最大功率点的原理,以及当前获得最大功率点的几种主要方法,提出了利用模糊控制来获取最大功率点的方法,模糊控制能够有效地克服光伏电池的非线性和时滞性,跟踪迅速,而且反应灵敏,计算量小,控制精度高,受外界影响小。并给出模糊控制器的详细设计过程,进行了Matlab仿真,获得了理想的结果,对比得出模糊控制方法的优越性。
- 关键字:
MPPT 设计 电池 控制 模糊 基于
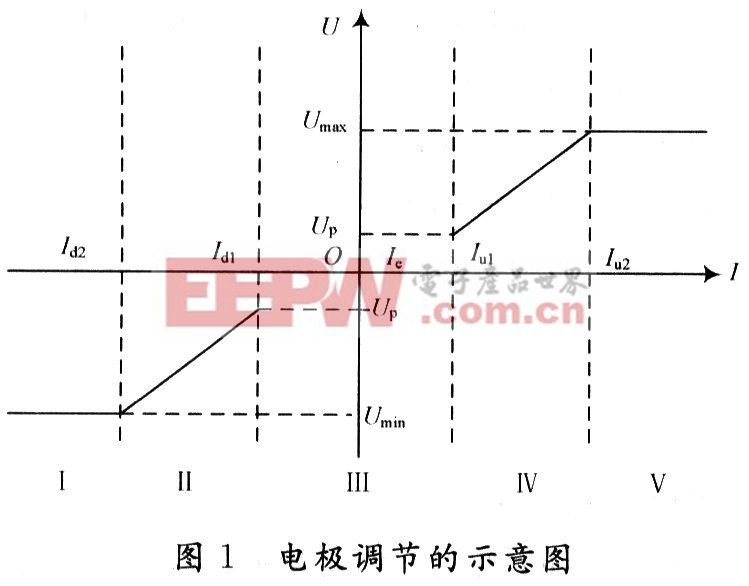
- 针对电弧炉的非线性、大滞后、强耦合、时变及随机干扰较强的特点,应用自适应控制理论,采用可编程逻辑控制器(PLC)为核心控制部件,实现电弧炉电极升降的自动准确控制,有效减少电极短路、断弧和振荡现象。在此给出控制方案、系统主要硬件及软件流程图。该系统已可靠运行于某炼钢厂,并实现了降低电炉电耗,提高产品质量的目的。
- 关键字:
控制系统 大型 PLC S7-300 基于 转换器
- 提出了一种以CAN总线为通信工具,DSP芯片为控制器的主处理器和双位置传感器的反馈结构,其配合主控计算机和底层控制器双层反馈的控制方式,可适于仿人步行机器人的分布式运动控制系统.整个控制系统结构灵活、功能强大、工作稳定可靠,可以显著提高仿人机器人的运动性能.
- 关键字:
运动 控制系统 研究 机器人 传感器 CAN 总线 基于 CAN
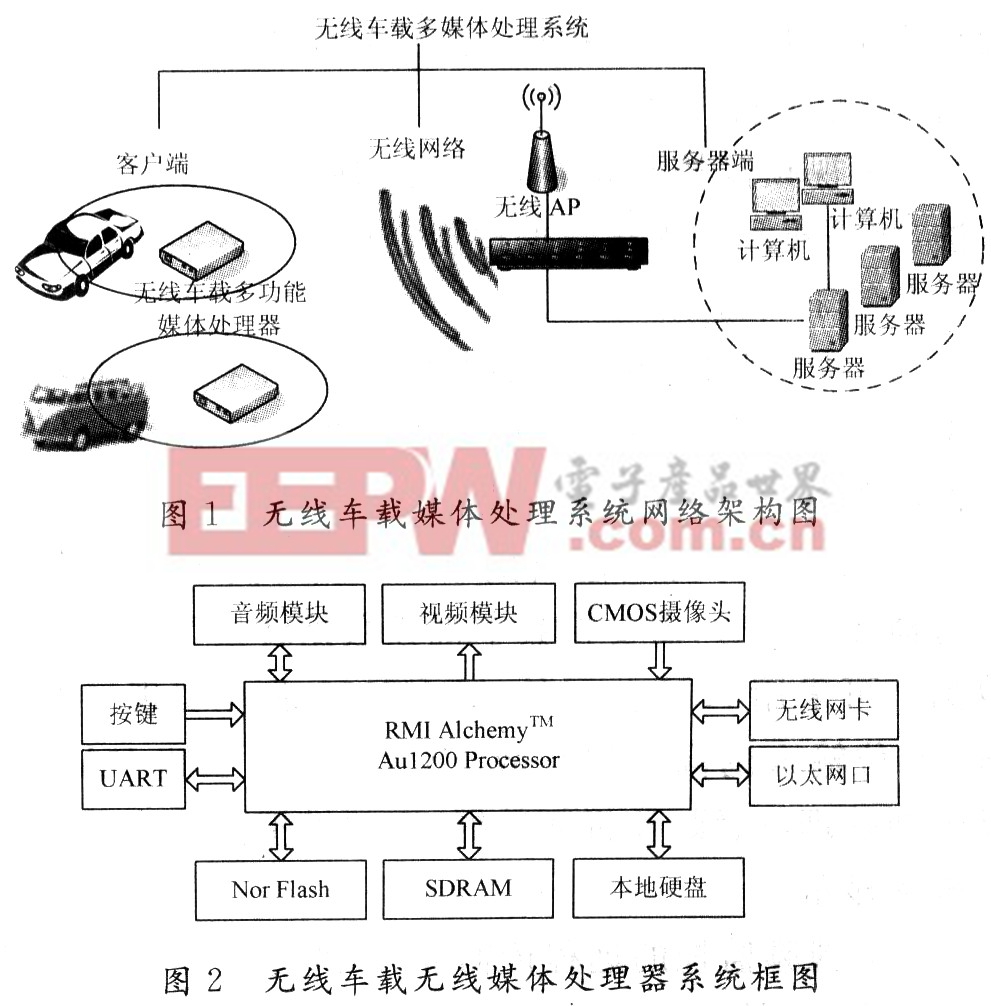
- 基于Au1200无线车载视频监控的设计与实现,基于Au1200设计无线车载媒体处理系统,介绍系统中视频监控部分的设计方案,提出基于ffmpeg的软压缩方法,设计并实现了视频监控的实时采集、压缩和存储。利用ffmpeg软压缩方法,将采集到的视频数据实时压缩成视频文件存储于硬盘中,降低了系统成本,对实际嵌入式媒体处理系统的开发具有较大价值。
- 关键字:
设计 实现 视频监控 车载 Au1200 无线 基于 转换器
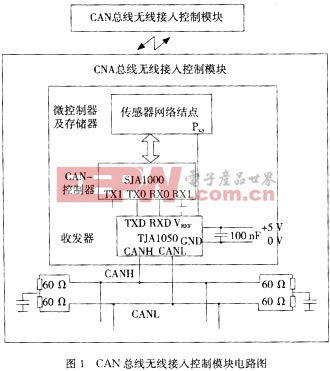
- 本文基于无线传感器网络给出一种连接CAN总线的无线通道设计,主要包括CAN总线无线接入控制模块电路设计以及无线传感器节点的通信协议设计等内容。目前,该系统已经实现,实际使用效果良好。本文内容对于一般的信息采集无线传输系统设计具有较好的借鉴意义。
- 关键字:
总线 互联 CAN 网络 无线 传感器 基于 CAN
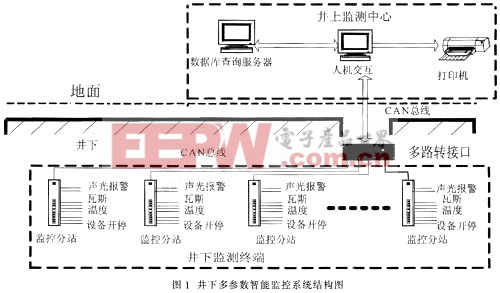
- 介绍一种基于CAN总线的矿井下多参数智能参数监控系统。该系统能够实时监测井下包括瓦斯浓度、风速、温度、负压、液位等各种参数,并进行一定处理,再经CAN总线通信传送回井上监控主机,地面主机人机交互通过虚拟仪器来实现,具有工作状况监控、数据记录查询、显示以及历史数据记录和分析等功能,有很高的推广价值。
- 关键字:
监控系统 设计 参数 井下 CAN 总线 基于 CAN
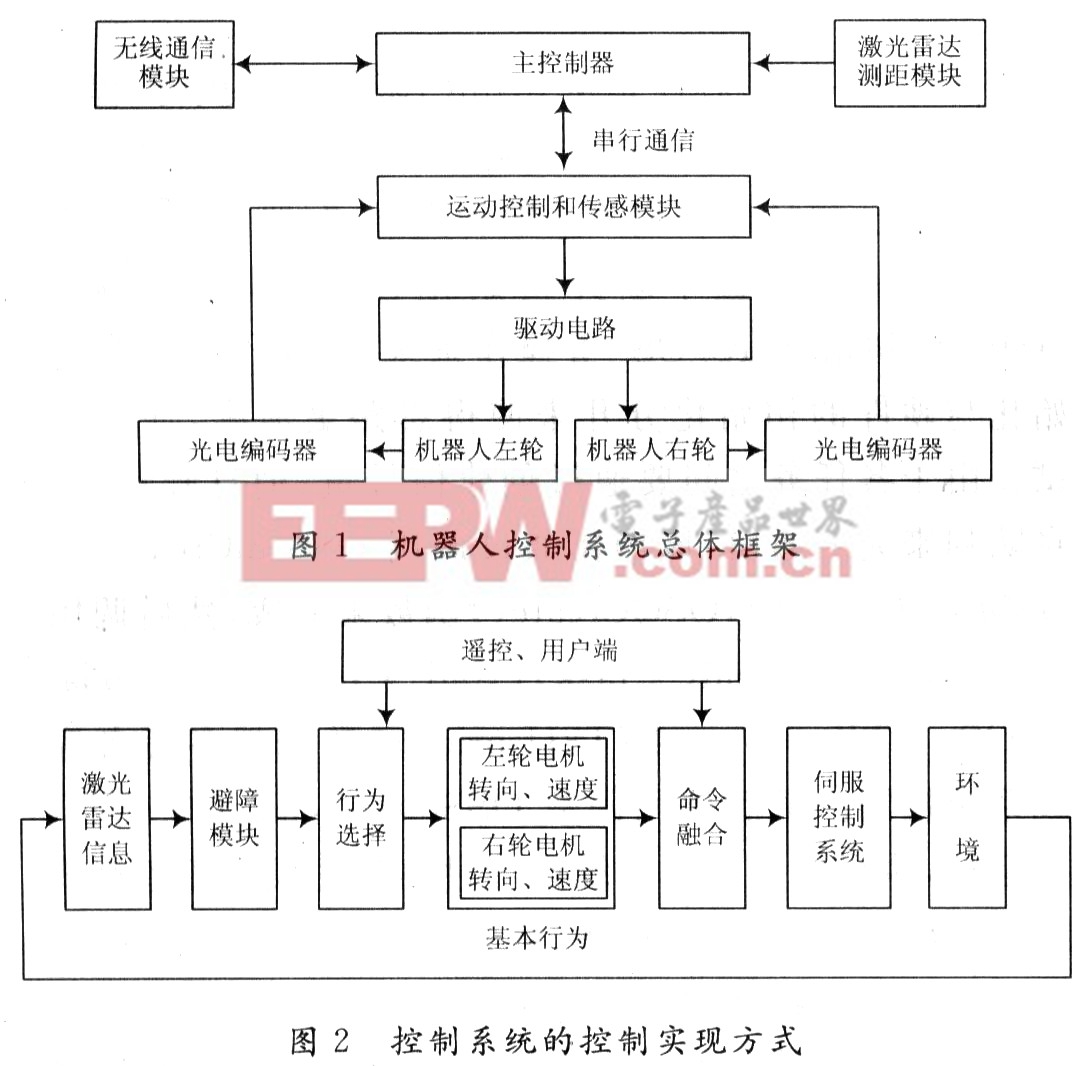
- 根据激光雷达跟踪测量定位理论,介绍一种基于μC/OS-Ⅱ的实时机器人控制系统。该控制系统采用分层分布式控制系统设计方案,主控制模块以S3C44BO为硬件平台,并以μC/OS-Ⅱ为软件平台,通过多任务划分,将整个系统功能分成多个按不同优先级的调度任务,以实现机器人不同功能的需求。伺服控制模块以TMS320F2812为控制器,并以PID为控制决策算法。性能测试表明,该控制系统控制精度高,稳定性好,系统响应迅速。
- 关键字:
控制系统 设计 机器人 雷达 激光 基于 转换器
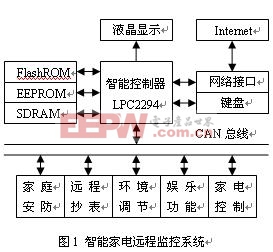
- 主要介绍了系统的整体功能结构,带有嵌入式操作系统uClinux和CAN控制器的智能控制器LPC2294的硬件设计,系统的任务分析和软件设计。本系统以智能控制器LPC2294为核心,把由CAN总线组成的家电控制局域网和互联网相结合,从而实现了家电的集中管理和远程监控。
- 关键字:
远程 监控系统 家电 智能 CAN 总线 基于 CAN
- 基于现场总线的开放结构机械手控制系统是目前机械手控制的发展方向。文章通过对物料搬运机械手装置及其控制系统的介绍,提出了基于CAN总线的机械手控制系统方案,分析了控制系统的结构组成,并对在Windows98平台上用VC++6.0开发CAN总线控制系统软件进行了较为详细的论述。
- 关键字:
控制系统 机械手 总线 CAN 基于 CAN
基于介绍
您好,目前还没有人创建词条基于!
欢迎您创建该词条,阐述对基于的理解,并与今后在此搜索基于的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473