频率响应法--极坐标图


5.3.2 开环系统的伯德图
则其对应的对数幅频和相频特性分别为
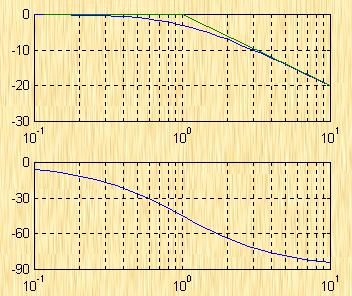
因此,只要作出所含各环节的对数幅频和相频特性曲线,然后对它们分别进行代数相加,就能求得开环系统的伯德图。 一般绘制开环系统伯德图的步骤如下: (1)写出开环频率特性的表达式,将其写成典型环节相乘的形式。 (2)将所含各环节的转折频率由小到大依次标准在频率轴上。注意,由于比例环节和积分环节没有转折频率,因此可以排在最左边。 (3)绘制开环对数幅频曲线的渐近线。渐近线由若干条分段直线所组成,其低频段的斜率为 ,其中 为积分环节数。在 (4)作出以分段直线表示的渐近线后,如果需要,再按照前述的各典型环节的误差曲线对相应的分段直线进行修正,就可得到实际的对数幅频特性曲线。 (5)作相频特性曲线。根据开环相频特性的表达式,在低频、中频及高频区域中各选择若干个频率进行计算,然后连成曲线。 例5-4试绘制开环系统的伯德图 ... 已知一反馈控制系统的开环传递函数为 试绘制开环系统的伯德图。 解 系统的开环频率特性为 由此可知,该系统是由比例、积分、微分和惯性环节所组成。它的对数幅频特性为 按上述的步骤,作出该系统对数幅频特性曲线的渐近线,其特点为 1)由于 ,因而渐近线低频段的斜率为 。在 处,其高度为 。 2)当 时,由于惯性环节对信号幅值的衰减任用,使分段直线的斜率由 变为 。同理,当 时,由于微分环节对信号幅值的提升任用,使分段直线的斜率上升 ,即由 变为 。 系统的相频特性按式: 进行计算。 上述作图过程同样可使用如下的Matlab语句绘制Bode图方法。 %ex5_4 funcTIon ex5_4 G=tf(10*[0.1,1],conv([1,0],[0.5,1]));%得到传递函数 [x0,y0,w]=bode(G);%由Bode函数获取幅值和相角 [x,y]=bode_asymp(G,w);%得到转折频率 subplot(211),semilogx(w,20*log10(x0(:)),x,y);%画幅频曲线和渐近线 subplot(212),semilogx(w,y0(:))%现相频曲线 图5-28为该系统的伯德图。
|

 的直线,且在
的直线,且在  处,
处,  ,如图5-23所示。由式(5-41)求得,这些不同斜率的直线通过0dB-44)中的1和
,如图5-23所示。由式(5-41)求得,这些不同斜率的直线通过0dB-44)中的1和  项,则得
项,则得
 的高频渐近线为一斜率
的高频渐近线为一斜率  的直线。不难看出,两条渐近线相交于
的直线。不难看出,两条渐近线相交于  。
。  称为振荡环节的转折频率。基于实际的对数幅频特性既与频率
称为振荡环节的转折频率。基于实际的对数幅频特性既与频率  和
和  有关,又与阻尼比
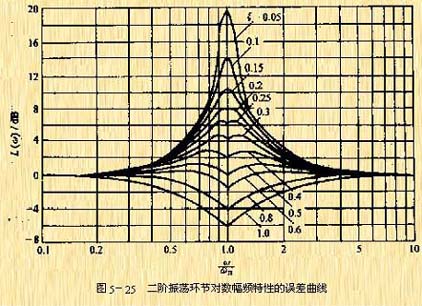
有关,又与阻尼比  有关,因而这种环节的对数幅频特性曲线一般不能用其渐近线近似表示,不然会引起较大的误差。图5-25所示。由图可见,
有关,因而这种环节的对数幅频特性曲线一般不能用其渐近线近似表示,不然会引起较大的误差。图5-25所示。由图可见,  值越小,对数幅频曲线的峰值就越大,它与渐近线之间的误差也就越大。
值越小,对数幅频曲线的峰值就越大,它与渐近线之间的误差也就越大。

 有最小值,则
有最小值,则  便有最大值。把式(5-46)改写为
便有最大值。把式(5-46)改写为
 值范围,讨论在什么条件下,式(5-44)会有峰值出现,这个峰值和相应的频率应如何计算。
值范围,讨论在什么条件下,式(5-44)会有峰值出现,这个峰值和相应的频率应如何计算。 时
时 时,
时,  有最小值,即
有最小值,即  有最大值,这个最大值称为谐振峰值,用
有最大值,这个最大值称为谐振峰值,用  表示之。基于
表示之。基于  值为
值为  ,由式(5-26所示。产生谐振峰值时的频率叫谐振频率,用
,由式(5-26所示。产生谐振峰值时的频率叫谐振频率,用  表示,它的值为
表示,它的值为 

 趋于零时,
趋于零时,  就趋向于
就趋向于  。当
。当  时,
时,  总小于有阻尼自然频率
总小于有阻尼自然频率  。
。 时
时
 随着
随着  的增大而增大,因而
的增大而增大,因而  随着
随着  的增大而单调地减小。这意味着,当
的增大而单调地减小。这意味着,当  时,幅值曲线不可能有峰值出现,即不会产生谐振。当
时,幅值曲线不可能有峰值出现,即不会产生谐振。当  时,
时,  有最小值,其值为期1
有最小值,其值为期1


 处, 。以低频段作为分段直线的起始段,从它开始,沿着频率增大的方向,每遇到一个转折频率就改变一次分段直线的斜率。如遇到
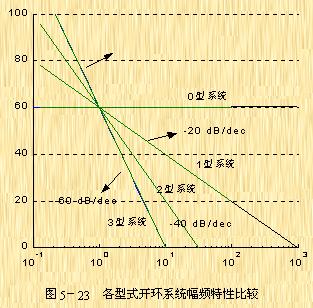
处, 。以低频段作为分段直线的起始段,从它开始,沿着频率增大的方向,每遇到一个转折频率就改变一次分段直线的斜率。如遇到  环节的转折频率 ,当 时,分段直线斜率的变化量为 ;如遇到 环节的转折频率 ,当 时,分段直线斜率的变化量为 ,其它环节用类似的方法处理。分段直线最后一段是开环对数幅频曲线的高频渐近线,其斜率为 ,其中n为 的零点数。
环节的转折频率 ,当 时,分段直线斜率的变化量为 ;如遇到 环节的转折频率 ,当 时,分段直线斜率的变化量为 ,其它环节用类似的方法处理。分段直线最后一段是开环对数幅频曲线的高频渐近线,其斜率为 ,其中n为 的零点数。 ,而后者的相位 。这个特征可用于判别被测试的系统是否是最小相位系统。
,而后者的相位 。这个特征可用于判别被测试的系统是否是最小相位系统。  、速度误差系数 和加速度误差系数
、速度误差系数 和加速度误差系数  。对数幅频特性的低频段是由因式
。对数幅频特性的低频段是由因式  来表征的,对于实际的控制系统, 通常为0
来表征的,对于实际的控制系统, 通常为0 ;
;

 。
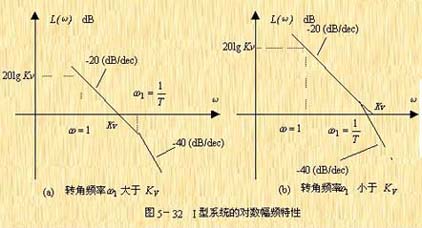
。 处的纵坐标值为
处的纵坐标值为  ,由此可求出稳态速度误差系数
,由此可求出稳态速度误差系数  。
。 在数值上也等于低频渐近线(或其延长线)与0dB线相交点的频率值。
在数值上也等于低频渐近线(或其延长线)与0dB线相交点的频率值。

 。
。 处的纵坐标值为
处的纵坐标值为  由此可求出稳态加速度误差系数
由此可求出稳态加速度误差系数  。
。 在数值上也等于低频段渐近线(或其延长线)与0dB线相交点的频率值和平方。
在数值上也等于低频段渐近线(或其延长线)与0dB线相交点的频率值和平方。
评论