抖动及其测量技术(07-100)
——

由于相位噪声与Л/2相比总是小得多,上式可近似地为:
本文引用地址:https://www.eepw.com.cn/article/92050.htmc(t)=Asin(ct)+Aθ(t))cos(ct)
假定抖动是一个稳定随机过程,时钟的均方值(MR):
(c(t)2)=A2/2+A2/2×<θ(t)2
在频率域,正弦函数和余弦函数会在-c和c处产生多频信号,因而在c(t)功率谱中扣除多频信号谱,留下的就是相位噪声功率谱,用Pθ(f-fc)来表示,如图4所示。按照Wi-ener-khintchine定理,在频率域中对Pθ(f-fc)进行积分就可得到θ(t)的MR值。由此可求得周期抖动JPER的均方根值(RMS):
RMS(JPER)=2/Ac×![]()
上试就是频率域中测量抖动RMS的基本方程式,考虑到时钟信号与相位噪声幅度大小的关系,常常对信号强度进行压缩(用dB表示)来测量时钟信号的质量。
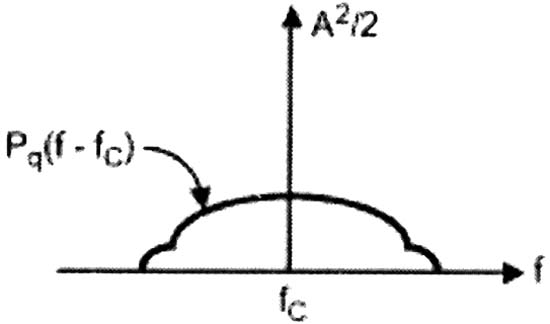
图4 时钟信号基波的功率谱
结语
首先,描述了抖动的定义、分类以及相互间的关系。抖动会严重影响系统的性能,尤其是影响高速率数字通信系统。抖动具有随机性和确定性的成分,分析抖动的成因并采取相应的措施来减少抖动。随后,介绍了在时域和频域测量抖动的方法。具体的测量仪器有实时数字示波器、取样时间间隔分析仪、等时取样示波器、模拟相位检测器和误码率测试仪等。示波器一直是传统测量仪器、可用直方图和眼图来表示与估算抖动。采用后处理技术,能提供周期间测量、趋势与谱图、最坏情况捕获等附加信息,进一步能增加复杂的时钟恢复、抖动分离算法和误码率预测功能。(东华)



评论