基于L297和L298的步进电机驱动器的设计(07-100)
——

软件设计
本文引用地址:https://www.eepw.com.cn/article/92009.htm当程序进入到非程序区,只要在非程序区设置拦截措施,使程序进入陷阱,然后强迫程序回到初始状态。如对CPU的RST指令对应的字节码为0FFH,如果不用的程序存储区预先写入0FFH,则当程序因干扰而“飞”到该区域执行代码时,就相当于执行1条RST指令,从而达到系统复位的目的。
采用C语言编写程序代码
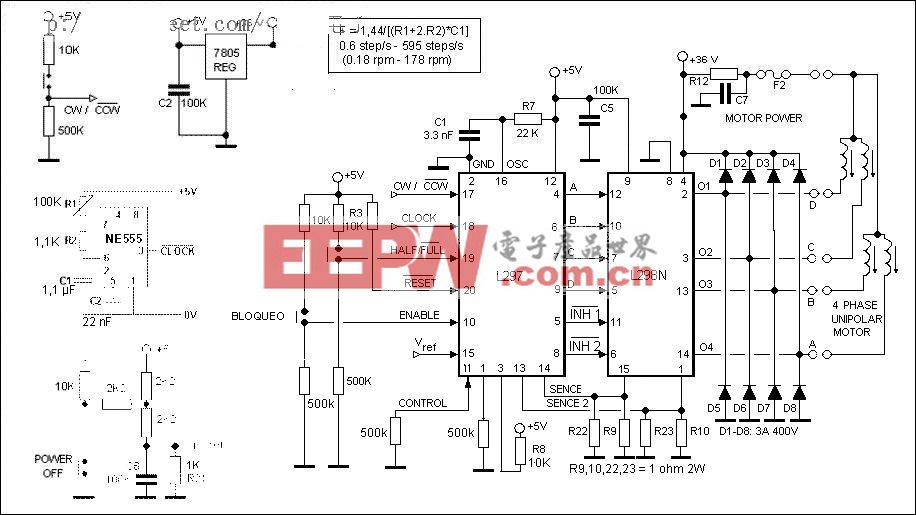
PO_ 0=1; //CW 方向
PO_ 1=1; //HALF 半步
PO_3=1; //ENABLE 使能
PO_ 2=1; //RESET 复位
PO_7=1; //CLOCK 时钟
TMOD=O X O1; //TI采用定时器
THO=(一4000/256);
TLO=一(400000256);
TRO二I;
for(;;)
{
THO=一(4000/256);
TLO=一(4000% 256);
do{}while(! TFO);
PO_ 7=! PO_ 7; CLOCK 输出时钟
TFO=O;
}
结语
采用此设计的步进电机驱动系统,在驱动二相或四相混合式步进电机时运动平稳,速度快,噪音低,控制精高,而且可选整步半步驱动。外观采用铝镁合金,散热性好,价格低廉,可广泛应用于需要驱动电流小于2A的混合式两相或四相步进电机的系统中。









评论