电动汽车分布式电机驱动测试系统研究与应用

使用IMC公司生产的imc C1数据采集器作为系统数据网关,它标配有2个CAN节点,8路模拟输入通道和支持TCP/IP协议的Ethernet接口。机械特性子系统和内部信息调试子系统分别通过两路独立的CAN总线、环境监测子系统通过多路模拟通道连接到imc C1。最后,这三个子系统的所有数据经imc C1的以太网口传输到测控计算机。系统数据流图如图3所示。
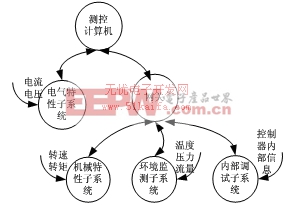
图3 测试系统数据流图
3 关键技术研究
监测系统软件开发环境采用美国NI公司的虚拟仪器开发软件Labview7.0。它采用图形化编程语言,提供了大量功能函数,有助于提高程序可靠性和开发效率。
系统开发包括软硬件平台搭建、数据采集与处理、数据信息管理、软件界面设计和系统可靠性与误差分析等方面的工作,本文对其中的几点关键技术予以详述。
3.1 GPIB通信
通用接口总线GPIB(General Purpose Interface Bus)是高速率8位并行数字接口,已成为IEEE 488标准。
本文采用NI公司的PCI-GPIB接口卡,最高传输速度可达1.5Mbytes/s。待集成的D6000功率分析仪可进行终端电量的测量和分析,它的组件61D2模块包含GPIB接口。
软件使用LabVIEW下的VISA相关函数实现GPIB通讯,VISA资源名称为GPIB:6。用到的接口函数有:SH1, AH1, T5, L4, SR1, RL1, PP1, DC1, DT1, C0, E2。
本文采用模块化编程,各模块功能如下:
初始化:包括获取仪器地址,重置,选择工作模式。
仪器设置:设置采样频率,设置平均方式,超时时间设定。
触发:触发源设置,触发方式,软件触发。
数据设置:设置功率分析仪,读取所测变量。
读取并显示数据:使用“RED?”指令和VISA的Write和Read函数读取数据,并进行格式转换。
出错信息显示:出现错误时予以提示,并指出数据流出错环节。
关闭仪器:关闭总线I/O接口。
3.2 CAN通信
CAN总线(Controller Area Network)是一种具有很高保密性、有效支持分布式控制或实时控制的串行通信网络,目前在工业控制尤其是汽车工业中得到广泛应用。
完整的CAN总线通信接口的硬件部分应包括CAN收发器、电气隔离部分、CAN控制器等。本系统使用了2路CAN总线,分别制订两个不同的协议,以实现兼容,防止冲突。使用CRONOS PL/2 UNI8数据采集器作为两路CAN总线的网关。连接机械特性测试子系统的CAN总线命名为CAN0,其协议规定了转矩和转速的信息格式,内部信息调试子系统的CAN总线命名为CAN1,用于传输控制器内部运行参数和控制命令等。
其CAN通讯流程图如图4所示。
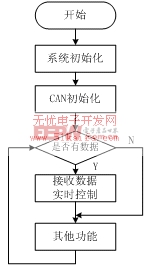
图4 CAN通信程序流程图
3.3 系统误差分析










评论