基于DSP与FPGA的机器人声控系统设计方案

 本文引用地址:https://www.eepw.com.cn/article/241694.htm
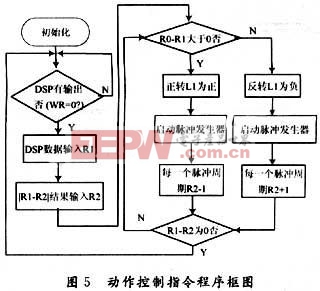
本文引用地址:https://www.eepw.com.cn/article/241694.htm其中R1为DSP指令寄存器,R2为当前坐标寄存器,通过DSP的输出坐标与FPGA的当前坐标进行差值运算来确定步进电机的旋转方向和旋转角度,优点是可以根据新的输入指令的变化,结束当前动作以运行新的指令,指令执行完毕后,系统清零,步进电机回到初始状态。
4.2 FPGA逻辑仿真
FPGA以MAX-PLUSⅡ开发平台,用语言为VHDL语言对上述逻辑功能进行设计,并通过JTAG接口进行了调试,FLEXl0KE芯片能够根据DSP输出指令输出正确的正反转信号和脉冲波形。
4.3 步进电机驱动设计
FPGA通过P1,L1,P2,L2输出控制控制步进电机驱动芯片。步进电机驱动采用的是东芝公司生产的单片正弦细分二相步进电机驱动专用芯片TA8435H,FPGA与TA8435H电路连接如图6。
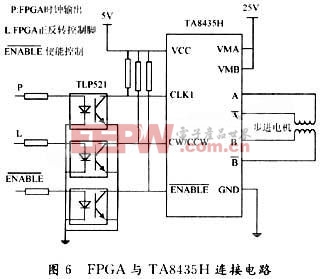
由于FLEX1OKE和TMS320VC5509工作电压为3.3 V,而TA8435H为5 V和25 V,所以管脚连接使用光电耦合器件TLP521,使两边电压隔离。CLK1为时钟输入脚,CW/CCW为正反转控制脚,A,A,B,B为二相步进电机输入。
5 结 语
系统充分利用了DSP的高处理速度和可扩展的片外存储空间,具有高速、实时、识别率高的特点并支持大的语音库,FPGA的使用使系统电路获得简化,一片 FLEXl0KE芯片可以完成2个步进电机的时序控制。虽然在处理速度和语音库的存储容量上与PC机系统具有一定的差距,但在机器人的微型化、低功耗和特定功能实现上,以DSP和FPGA为核心的嵌入式系统无疑具有广阔的前景。













评论