DSP56F807在交流随动系统中的应用

●软件限位就是通过软件的分析计算,控制系统运动位置不超过设定的位置,它是限位里最低级的一种。
●电气限位就是当系统发生故障,软件限位没有起到限位作用时,系统超过软件限定的位置而继续运动,在到达电气限定位置时,使限位微动开关断开,通过电路控制使制动器处于抱紧状态,控制电机停止转动,从而实现限位的功能。
●机械限位是通过机械结构的设计,对系统进行位置的限制。这是一种最基本也是最原始的限位方法,是系统限位的最后一道关卡。当软件限位和电气限位均未产生作用时,必须通过机械限位(硬碰撞)使系统停止在某一位置,保证系统的安全性。
3.2.2 电气限位和制动的实现
图3所示为电气限位、锁定电原理图:
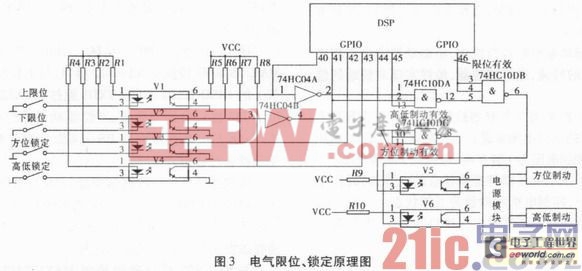
开机初始化过程中,首先通过DSP的I/O口,检测锁定开关是否处于闭合状态。如果锁定开关闭合(即锁定器处于锁定状态),DSP送出方位制动命令1、高低制动控制命令0和限位控制命令1,与非门输出为0,控制光电耦合管处于导通状态,光电耦合管的输出作为可控+24 V电源模块的控制端,使电源不输出+24 V电压,控制电机制动器处于制动状态。软件将检测到锁定开关状态上传,提醒操作手解脱锁定装置。
如果锁定开关处于断开状态时,DSP送出方位制动命令0、高低制动命令1,检测上下限位(是指高低方向的限位,开关断开为限位,闭合为非限位)开关是否处于闭合状态。假设限位开关处于闭合状态,DSP检测到后,送出限位控制命令0,与非门输出为1,光电耦合管不导通,电源模块输出+24 V,使高低电机制动器处于非制动状态,由DSP程序控制电机转动,系统处于正常工作状态。在正常工作时,DSP送出限位控制命令为1、方位制动命令为0、高低制动命令为1,使光电耦合管V5的导通与否受限位开关的控制,当上、下限位开关处于闭合状态时,光电耦合管非导通,电源模块输出+24 V,使电机制动器处于非制动状态;只要上、下限位开关其中之一处于断开状态,光电耦合管导通,电源模块输出为0 V,电机制动器处于制动状态,从而保护整个系统的安全。
4 结束语
串口电路通信功能正常,锁定、限位控制电路稳定有效,整套电路已成功应用于某型武器系统中。实践证明,作为电机控制的专用芯片DSP56F807具有以下优势:较高的运算速度能够满足电机高性能的控制算法;较大的片内存储空间(基本不需要外扩存储器)降低了用户成本并且提高了程序安全性;高度集成的片内外设增加了电机控制系统的集成度使系统的可靠性大大提高;良好的软件开发环境,提供了大量的专用函数库,大大缩短了产品开发周期。

评论