机动目标跟踪算法在车载毫米波雷达防追尾系统中的应用

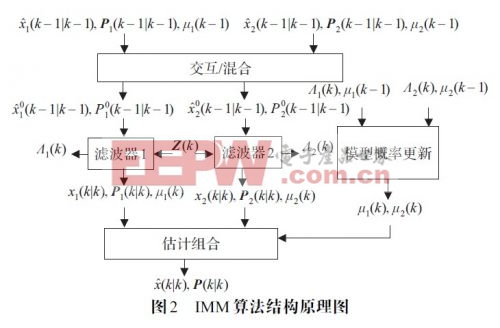
IMM算法可归纳如下4 个步骤。
步骤1 输入交互:
根据两模型(k-l)时刻的滤波值和模型概率,计算交互混合后的滤波初始值,包括模型1 的滤波初始值:滤波估计值X 01
(k - 1)和估计协方差μ1(k - 1);模型2 的滤波初始值:滤波估计值X 02
(k - 1)和估计误差协方差P02
(k - 1)。设系统在(k-1)时刻模型1 概率为μ1(k - 1),滤波值X1
(k - 1),估计误差协方差为P2(k - 1)。模型2 的概率为μ2(k - 1),滤波值为X 2
(k - 1),系统估计误差协方差为P2(k - 1)。则进一步推广到r 个模型,交互后r模型的滤波初始值为:

步骤2 模型条件滤波:
对应于模型Mj(k),以X 0j
(k - 1|k - 1),P0j(k - 1|k - 1)及Z(k)作为输入进行卡尔曼滤波。
卡尔曼预测方程:

i = 1rΛj(k)cj_,而Λj(k)为观测Z(k)的似然函数:

图2 为IMM算法结构原理图
4 车辆运动模型分析与IMM算法跟踪仿真
试验设计:考虑两辆车在道路上同向行驶,在0~10 s 时,两车均保持匀速直线运动,由安装在后车上的车载毫米波雷达检测出与前车的距离为100 m,相对速度为-3 m/s,方位角2°。
在10~15 s 时,前车向右偏转,与后车的相对角加速度为1° s2。
后车加速,与前车的纵向相对加速度为a = -1.8 m/s2。雷达的扫描周期为T=0.1 s,系统噪声为σα = 0.3 m/s,σβ = 0.3°/s。量测误差为σ1 = 1 mσ2 = 0.5 m/sσ3 = 0.2°/s。

评论