各类运动传感器工作原理揭秘

前面的图3给出了随时间变化的陀螺仪零偏,它代表了长期航向漂移的根本原因。在9轴传感器融合系统中,加速度计和磁力传感器建立了一个长期的基准用于校正零偏变化。但磁力传感器读数中的噪声以及磁力传感器类型对零偏校正的效果有显著的影响。图7再次显示了随时间改变的零偏变化,但这次画出了未校正的、用霍尔效应传感器校正的、用永磁感应传感器校正的和理想输出的图形。值得注意的是,所用的传感器融合算法对两种传感器来说是相同的。
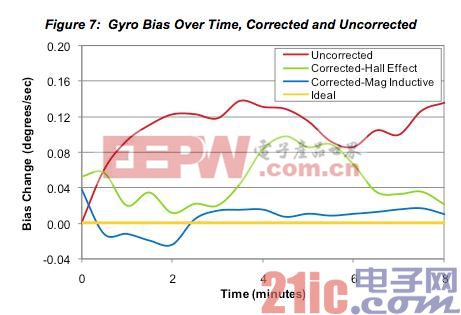
图7:随时间改变的陀螺仪零偏,包括校正和未校正的情况。
从图7可以明显看出,使用永磁感应传感器的9轴传感器融合系统在尽量减小零偏变化方面做得比霍尔效应传感器要好。这种零偏漂移方面的改进直接得益于永磁感应传感器低一个数量级的噪声,因为霍尔效应传感器相对较高的噪声将在传感器融合算法中引入不确定性,进而减弱算法控制零偏的能力。
永磁感应传感器可以更好地控制零偏漂移的能力将显著改善随时间变化的航向性能,如图8所示。我们在这里可以看到,与未校正系统相比,使用霍尔效应传感器的传感器融合系统的长期性能在8分钟内减少航向误差的效果高出2倍。但使用永磁感应传感器的传感器融合系统与未校正系统相比可以减少航向误差一个数量级,比基于霍尔效应磁力传感器的系统好5倍。
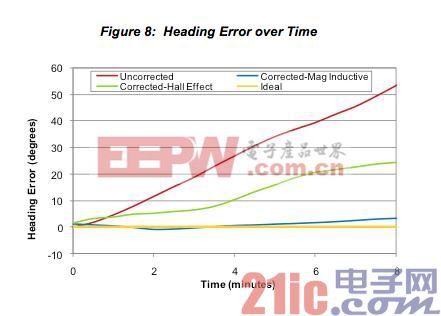
图8:随时间改变的航向误差。
本文小结
随着使用永磁感应式地磁传感器代替霍尔效应传感器的9轴传感系统的广泛普及,精确定位移动所需的资源已经就位。首先要理解精度和准确度远高于目前的“移动接近”系统的运动跟踪世界可能性,然后才能明白这个世界中的增强现实将更具无限可行性、游戏玩起来更直观、基于位置的应用也将更具鲁棒性。

万能遥控器相关文章:万能遥控器代码
传感器相关文章:传感器工作原理
霍尔传感器相关文章:霍尔传感器工作原理
风速传感器相关文章:风速传感器原理 霍尔传感器相关文章:霍尔传感器原理 加速度计相关文章:加速度计原理 矢量控制相关文章:矢量控制原理



评论