一种智能交通系统的自适应拥塞控制方法

其中,E^,E^C,S分别为e^,e^c和α的模糊量,其论域均为{-6,-5,-4,-3,-2,-1,O,1,2,3,4,5,6}。E^,E^C和S对应的模糊词集为{NB,NM,NS,ZO,PS,PM,PB}。根据在校正过程中要遇到的各种可能出现的情况和相应的调整策略得到控制规则表如表1所示。

根据表1,用Max-Min方法进行Fuzzy推理和逆模糊化,可得到模糊判决表。在系统运行时的t时刻采样周期内,根据E^,E^C由α调整规则模糊判决表可直接查出相应的S,从而得出α的相应调整值。
α(t)=kαxS+0.5 (5)
其中,kα为量化因子,使得α∈(0,1)。
4 控制算法实现步骤
对于整个模糊模型参考学习控制器来说,在t时刻采样周期内,根据队列长度误差和误差变化率E^,E^C,可由模糊判决表查出相应的S,进一步得到相应的α值,再由E,EC,α根据式(4)可得到规则自校正模糊控制器的输出U,并由量化因子ku计算得到丢弃概率p。控制算法实现步骤如下:
1)计算拥塞控制系统的输入状态。
2)根据参考模型的输出与实际对象输出计算e^,e^c。
3)根据参考模型误差和误差变化率E^,E^C,由式(5)计算相应的α值。
4)计算规则自校正模糊控制器的输出U。
5)由模糊控制的量化因子计算最终的丢弃概率p。
5 仿真研究
通过仿真试验来评估模糊参考模型网络自适应拥塞控制算法,交通流拓扑结构采用哑铃型结构,链路容量为1 500个/s,随机延时为[16 s,24 s]之间的平均分布,业务源采用了持续性业务流,交通路段的缓存为800个,平均流量长度为500个。仿真研究将本文提出的模糊模型参考控制方法与普通模糊控制进行比较,研究了在突发性状况下2种算法的控制性能和鲁棒性能。
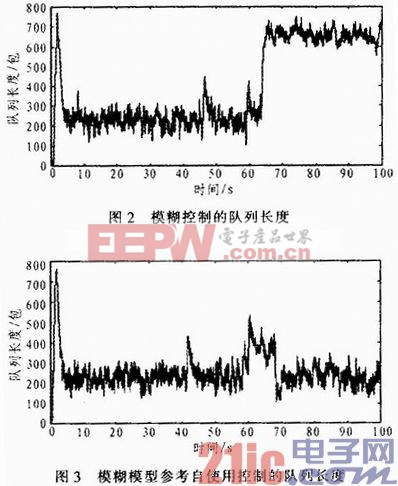
2种控制算法的仿真结果如图2、图3所示,注意到当输入源发生突发性增长时,普通模糊控制策略将使缓冲区队列长度严重脱离期望队列长度,而使用了模糊参考模型自适应控制后,缓冲区队列仅仅经过一个短暂的突发脉冲就恢复到平衡点附近。从实验结果可以看出,由于普通模糊控制器的推理方式和规则知识固定,因此在交通道路车流发生突发变化时难以达到满意的控制性能,而本文提出的车流自适应拥塞
控制方法能够跟随车流量状况实时调整模糊控制参数,进而对突发性车流拥塞对象具备了良好的自适应控制性能。
6 结束语
针对车流状态的突变行为,本文提出了一种基于模糊参考模型机制的自适应拥塞控制算法,以提高在多相位交叉路口的车流量控制的服务质量。该方法采用双通道信息回路对车流量缓冲区队列长度作自适应调整与控制。自适应模糊控制计算过程简单迅捷,该算法在自适应性能和实时性能之间实现了较好的平衡。性能之间实现了较好的平衡。







评论