基于台达运动控制型PLC 电子凸轮功能的高速绕线机

2.3电气系统配置
电气控制主要包括绕排线部分、步进分度部分、气缸动作控制部分。具体配置如表1所示。
表1绕线机电控配置

3台达PLC电子凸轮功能
高速绕线机的主要控制功能基于台达20PM电子凸轮的应用,使绕制产品的成品品质及效率大大提高。以下对电子凸轮功能作简单介绍:
3.1什么是电子凸轮
参见图5,凸轮是用于实现机械三维空间联动传动关系与控制的机械结构。自动化运动控制系统用软件程序与伺服电机实现三维空间联动传动关系与控制的软件系统就是电子凸轮功能。从图5可以看到,左边是我们常见的机械式凸轮方式,而右边就是电子凸轮方式。也就是说利用程序的方式(配合伺服单元)完成机械凸轮控制所需要的轨迹,实现主轴和从轴的啮合运动。
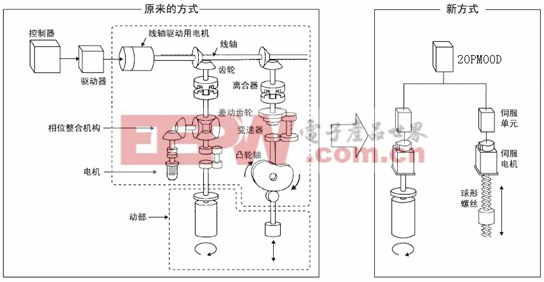
图4电子凸轮功能
3.2电子凸轮的实现
(1)获取主轴位置。获取主轴位置有多种方法:一是采用虚拟轴,计算简单准确;二是从主轴编码器或伺服脉冲获取,将主轴编码器信号进行处理;三是从测量编码器获取。获得编码器信号之后,将其换算成主轴位置。
(2)实现主从轴的啮合。实际上是定义主从轴之间的关系(称之为camtable)。camtable有两种方法表述:一是采用X、Y的点对点关系;二是采用两者的函数关系。camtable的获取也有多种途径:根据实际工作中测量到的点与点之间的对应关系,根据主从轴的标准函数关系。 camtable可以定义多个cam曲线。关系确定和实现后,根据主轴的位置,就能得到从轴的位置。
3.3台达运动控制型PLC的电子凸轮
台达20PM运动控制器除了实现直线/圆弧插补以及定位功能之外,内嵌了电子凸轮功能,使其可以应用在多种运动控制场合。20PM为2轴运动控制器,具有2路500KHz的输入与输出,在电子凸轮功能中定义X轴为从轴,Y轴为主轴,当定义好camtable后,从轴依据定义的曲线跟随主轴运动。图6是电子凸轮图形化定义软件主界面。

图6台达电子凸轮软件图形化定义主界面
在软件中我们可以清楚地利用图形方式设定、修改电子凸轮曲线。当我们点击进入资料表单设定按钮时会弹出下面的区段设置表。使用者需先设定 StartAng,EndAng,Stroke以及透过下拉式选单选取CAMcurve(具有连续、正弦、匀加速等6种曲线,并可加入其它标准曲线和自定义曲线),在设定完成后按下Settingcompleted按钮,即可在主画面绘制位移,速度,加速度坐标图7所示。

图7台达电子凸轮软件图形化定义分界面
图8是以高速绕线机为例的电子凸轮曲线图,采用CYCLIC模式排线从轴根据绕线主轴连续正反排线。以下是计算主从轴关系算式:
主轴转一圈所出线的距离(圆周长)=π*D(mm)Or绕线模具一圈的出线的距离(圆周长)=π*D(mm);
排线从轴转一圈所需脉波数=10000P/R=>相对应转一圈滚珠螺杆移动之距离=10mm;
主轴旋转一圈所需脉波=3600P/R=>从轴相对应主轴旋转一圈所转动的圈数所需脉波=100P/R=>相对应滚珠螺杆移动之距离=0.1mm
Master/Slave关系式=(主轴旋转一圈所需脉波*凸轮一周期的匝数)/(从轴相对应主轴旋转一圈所转动的圈数所需脉波*线径*排线宽度的匝数)
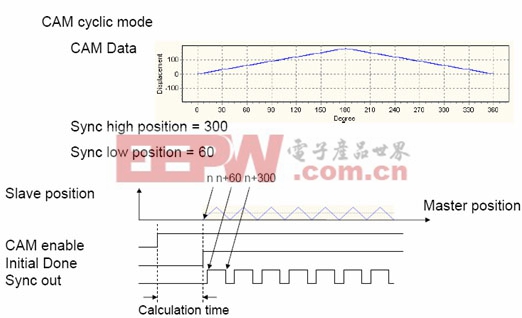
图8高速绕线机电子凸轮曲线图

伺服电机相关文章:伺服电机工作原理







评论