混合电动汽车能量流仿真系统设计与分析

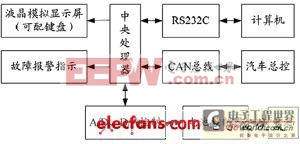
图4 控制系统结构
选用Microchip公司的PIC18F6720为主控制器,该MCU片内集成多通道的10位精度的采样转换器,可以方便的采集电池的电压、充电电流、放电电流和电池温度等多种信号;内置两个串行通信接口,可以与上位机进行异步通信;SPI接口可以用来扩展内部总线;PWM输出可以对回路电流进行调节等。控制系统电路如图5所示。
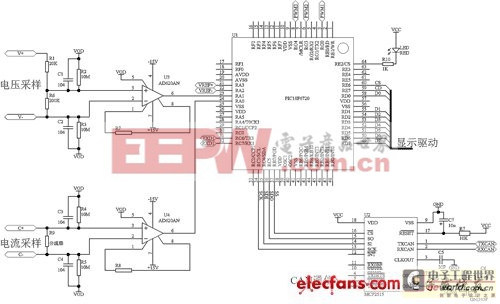
图5 控制系统电路
4 人机交互
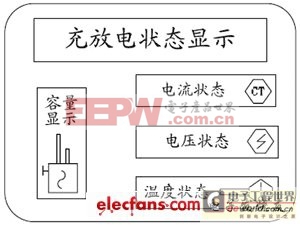
通过LCD显示器可以直观的显示系统的工作状态和电池工作情况,具有良好的人机交互界面。在控制系统中设置了短路与过热保护,故障报警指示,最大限度达到系统的安全可靠,保护系统与动力电池的安全。图6为LCD显示的示意图。
(a)工作状态
(b)测试状态
图6 LCD显示示意图
通信系统
系统内建了两种通信总线:CAN2.0B和RS-232C。
1 CAN总线通信
CAN总线是专为解决现代汽车中各种控制器、执行机构、监测仪器和传感器之间的数据通信而开发的总线式串行通信技术。但CAN只包括了物理层和数据链路层,在汽车工程师协会SAE推荐的标准SAE J1939进一步规范了汽车内部网络的标准。

评论