简述控制驱动法的实现

图6 VR预锁存波形
一个输出起始设置在零的计数器控制着关断电路。采用将计数器输出全部设置为0,也即在PWM控制信号的下降沿及QF的栅源电压之间实际上为零延时,结果QF的栅源电压,VR的漏源电压以及与门输出的三个波形示于图7(a)。
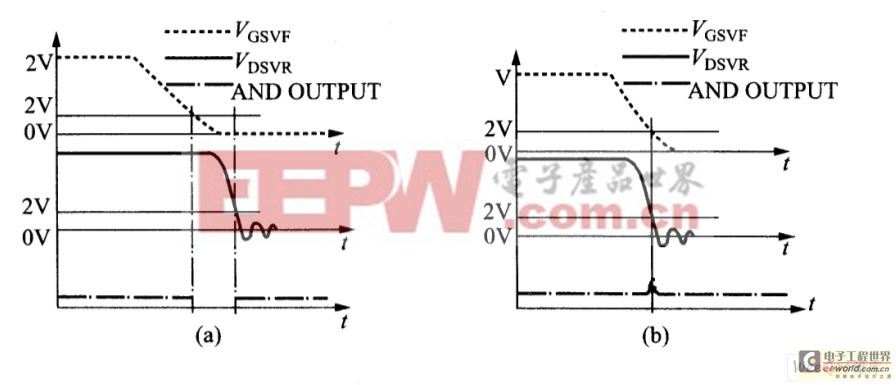
图7 VF的关断波形
(a)非最佳延迟(b)最佳延迟
VF关断电路中的与门更多的作用如VR开启控制电路中的或门,给一个命令到计数器,以直接令计数器向上或向下记数。在VF的关断电路的情况,一个高电平从与门直达计数器以便在下个周期中向上记数。当计数器为下个周期增加一个记数值,则PWM控制器的下降沿与VF的栅源电压之间的延迟就会增加,从与门的输出脉冲就会变窄,这个反馈影响将持续到VF的栅源电压和VR的漏源电压能够同步。当延迟最佳化时,波形示于图7(b)。
如在VR控制执行电路中所描述,电路将会在两个延迟值之间抖动,一个是最佳值,而另一个比最佳值略长一些。













评论