单片机控制的直流调速系统

5 调节器的设计
5.1 电流调节器的设计
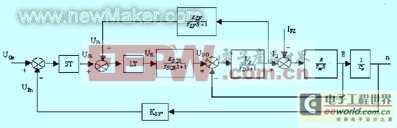
电流调节器的设计参见图2。
 |
差分方程: Ck=Ck-1+(K1+K2)ek-K1ek-1
其中, K1=K0-K’TLT
K2 = K’TLT
最后带入已知数据就可设计出电流调节器。
5.2 速度调节器的设计
在本次设计中按二次型性能指标最优控制[8]来设计速度调节器,首先求取速度环的状态方程,对于单输入系统,R为常数,选R=1,用计算机离线求出P阵,求出状态反馈阵为:
K = R-1BTP
若考虑速度调节器采用PI调节器,并加入比例微分负反馈,可以推导出:

6 系统软件设计
6.1 主程序设计
如图3所示的主程序流程图[9],它完成主程序完成系统的各种功能初始化操作。
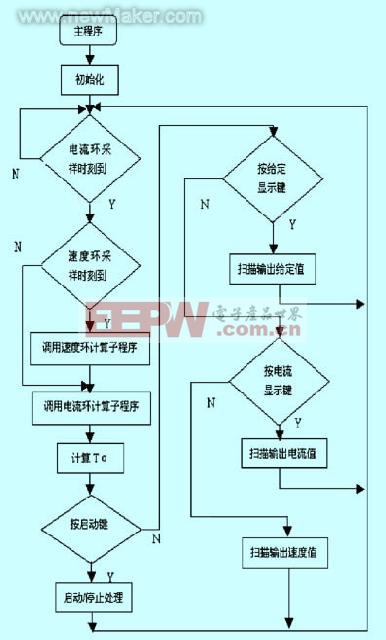 |
图3 主程序流程图 |
6.2 电流环中断服务程序的设计
它主要完成电机索零运算、电流调节器PI运算、轻载时电流自适应的运算。设系统电流断续临界值为I0,反馈电流采样值为I,则程序框图如图4所示。
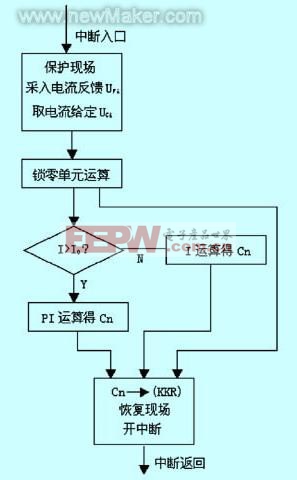 |
图4 电流环中断服务程序简化框图 相关推荐技术专区 |

评论