基于SOC单片机的pH值检测与控制

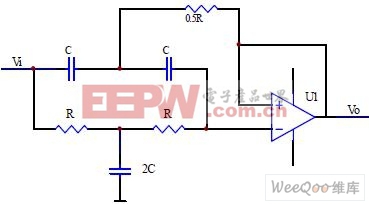
图3 50Hz陷波电路
此外,电路板表面的漏电流也是不能忽略的,在电路板上附着了灰尘、污质,或者是在环境比较潮湿的地方电路板表面的漏电流都会变得不可忽略,会影响对pH值信号的检测。
为减小电路板表面漏电流的影响,在电路板上CA3140的输入端放置金属环,并且在电路板的表层和底层都相应放置。如图2中虚线方框所示。
1.3 pH值测量原理
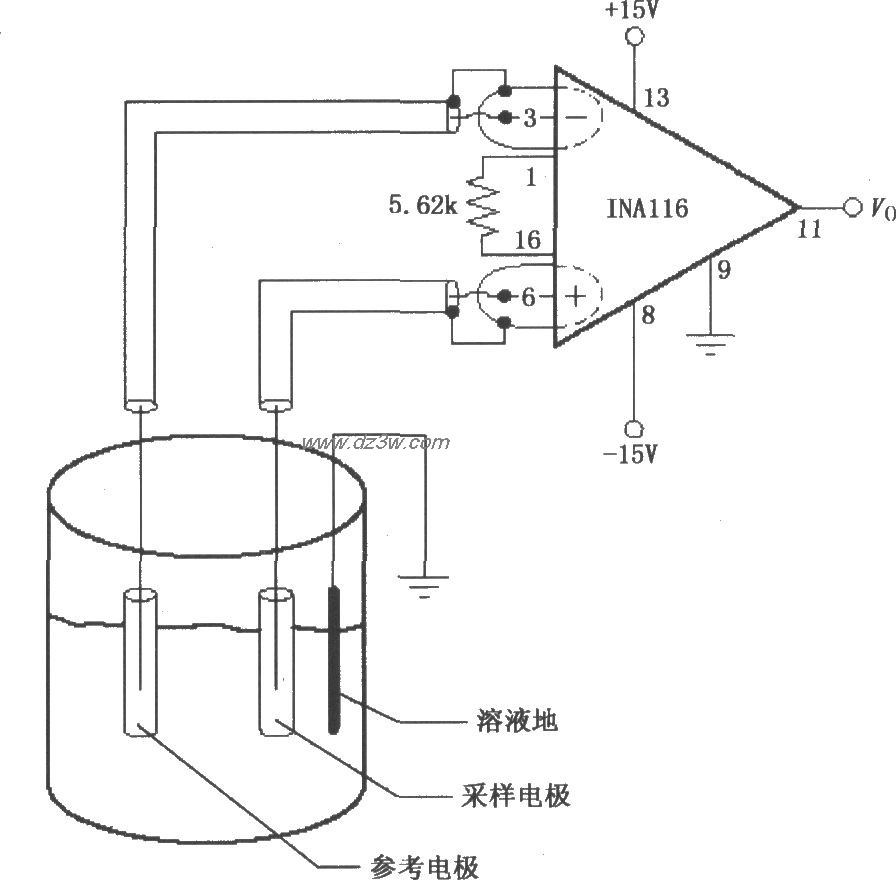
电位法测量溶液pH值常用玻璃电极作为指示电极,银-氯化银电极作为参比电极,将两种电极封装在起构成复合玻璃电极。将电极插人待测溶液,复合玻璃电极和待测溶液组成原电池,复合玻璃电极的两条输出引线分别为原电池的正极和负极。依据nernst方程,原电池输出电动势、被测溶液绝对温度及被测溶液pH值之间满足如下关系:

式中:E为原电池输出电动势,mV;E0为常数,为与电极材料、内参比溶液、内参比电极以及液接电位有关的电位差,mV;K为常数,为nernst系数;T为被测溶液的绝对温度,K;pHx是被测溶液的pH值;Ph0是常数,为复合玻璃电极内缓冲溶液的pH值。
由式(1)可知被测溶液的pH值和温度共同作用产生原电池输出电动势,因此同时测量原电池输出电动势和溶液温度就能根据式(1)计算出被测溶液的pH值。
由于玻璃电极的制造工艺等原因式(1)中参数E0和K的实际值与它们的理论会有差异并且随着电极的老化而改变,因此必须用pH值已知的标准缓冲溶液校正电极。由于水产养殖水环境呈碱性,故选用混合磷酸盐(pH=6.86)和硼砂(pH=9.18)的标准缓冲溶液进行校正,具体校正方法如下:设两个标准缓冲溶液的pH值分别为PH1、pH2输出电动势分别为E1和E2,在相同温度T下标定,由式(1)得到溶液输出电动势E与pH关系如下式所示:

将两个标准缓冲溶液的酸度pH1、pH2和对应电动势E1、E2及算出的参数K保存在E2PROM中。由式(3)得到待测溶液的pH值。
2 控制方法[4][5]
由于水产养殖最适合的pH值范围为:7~8.5,而且pH值同水中温度、溶解氧、浮游植物的光合作用、鱼类呼吸作用、氨氮等因子相互作用。此外,酸碱中和反应中pH值呈严重的非线性和滞后性,而且在中和点附近的斜率极大,而两端的斜率急剧变小,在中和点附近具有极高的灵敏度,给控制造成很大困难;少量的杂质会使过程特性发生严重畸变,难以建立准确的数学模型;pH传感器的动态特性易受环境(温度、压力、电极的清洁度等)变化的影响,而且外部干扰具有复杂性。
由于常规PID控制器简单、稳定性好、可靠性高而广泛应用于过程控制,但是常规PID控制器不能在线整定参数, 因而不能很好地控制非线性、时变的复杂系统和模型不清楚的系统。模糊控制器对复杂的和模型不清楚的系统能够进行简单有效地控制。因此,结合传统PID控制器的优点,同时考虑到模糊控制实现的特点,提出了自适应模糊PID控制方法。
PID参数自整定就是先找出PID控制器的3个参数Kp,Ki和Kd与偏差e和偏差变化率ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制规则对3个参量进行在线修改,以满足不同e和ec对控制器参数的不同要求,而使被控对象有良好的静、动态性能。本文将偏差e和偏差变化率ec作为模糊控制器的输入,调节PID控制器的3个参数Kp,Ki和Kd,从而控制执行机构电磁阀调节输出。根据事先确定好的模糊控制规则作出模糊推理改变3个PID参数的值,利用模糊控制规则在线对PID参数进行修改,修正后的PID参数则被应用到常规PID控制中用以提高系统的控制性能,这构成了自适应模糊PID,其结构如图4所示。

低通滤波器相关文章:低通滤波器原理
评论