连续超声波位置跟踪器的设计原理及其在虚拟现

L=int(L1/λC)+NCv/f2
其中int(L1/λC)表示L1/λC的取整运算 (8)
和传统的连续超声波相位差测距法相比较,上述连续调幅超声波测距法不仅继承了测量范围大、刷新频率高、测距精度高等优点,而且克服了处理电路复杂和需要粗测基准的缺点.它也不同于音频测距法,不会受到环境声音的干扰,也不会造成环境声音污染.
三、跟踪器设计
1.测距单元设计
测距单元由超声波发射机和接收机两个模块构成,两个模块的原理框图如图2和图3所示.
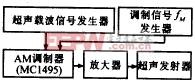
图2 发射器电路原理框图
图3 接收器电路原理框图 数字鉴相器的工作波形如图4所示. |
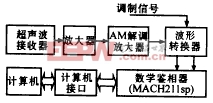

图4 数字鉴相器的工作波形图 至于该测距系统的电路设计、实验结果和性能分析请参考文献[7].
图5 超声波位置跟踪器的原理框图 四、实验结果与分析 |

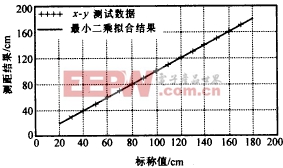
图6 测距结果与标称距离的比较 实验中使用发散角α=60°的换能器,测距单元的距离测量范围为30cm 表1 沿Cξ轴移动时跟踪器的基准标称坐标与测量坐标 |
| 次 数 | 基准标称坐标(cm) | 测量坐标(cm) | ||||
| ξ | η | ζ | ξ | η | ζ | |
| 1 | -20 | 10 | 120 | -20.77 | 10.59 | 121.08 |
| 2 | -15 | 10 | 120 | -15.75 | 10.53 | 120.98 |
| 3 | -10 | 10 | 120 | -10.56 | 9.97 | 119.94 |
| 4 | -5 | 10 | 120 | -4.1 | 10.16 | 120.69 |
| 5 | 0 | 10 | 120 | 1.07 | 10.68 | 120.87 |
| 6 | 5 | 10 | 120 | 5.34 | 10.47 | 120.52 |
| 7 | 10 | 10 | 120 | 10.53 | 11.08 | 119.91 |
| 8 | 15 | 10 | 120 | 14.36 | 10.05 | 120.15 |
| 9 | 20 | 10 | 120 | 20.04 | 9.87 | 120.91 |
表2 沿Cη轴移动时跟踪器的基准标称坐标与测量坐标 |
| 次 数 | 基准标称坐标(cm) | 测量坐标(cm) | ||||
| ξ | η | ζ | ξ | η | ζ | |
| 1 | 5 | -20 | 120 | 4.97 | -20.48 | 118.98 |
| 2 | 5 | -15 | 120 | 4.75 | -15.13 | 120.86 |
| 3 | 5 | -10 | 120 | 5.59 | -12.28 | 120.87 |
| 4 | 5 | -5 | 120 | 4.88 | -7.19 | 120.04 |
| 5 | 5 | 0 | 120 | 5.26 | -1.03 | 120.82 |
| 6 | 5 | 5 | 120 | 5.65 | 7.11 | 118.95 |
| 7 | 5 | 10 | 120 | 5.42 |
相关推荐技术专区 | |












评论