无传感器的直流无刷电机控制器ML4435及其应用

当电源首先加到ML4435时,电机处于静止,故反电势等于零。电机需要转动,以使反电势取样器自动跟踪电机位置,并使电机换向。ML4435用最低的VCO频率开始使电机换向。该低频换向由RVCO上的0?2V箝位设定,这就提供一为fmax/30的换向频率。
2.15 转动状态
在反电势传感后,PLL自动跟踪电机位置,电机则按闭合环路控制转动。在这一点上,速度控制环应迫使电机速度相应于SPEEDSET电压设置的速度。
2.16 PWM速度控制
速度控制是由在SPEEDSET(5脚)设置的速度指令来完成的,该脚输入电压为0.2~6V。速度指令的精度由外部元件RVCO和CVCO确定。控制ML4435的速度指令有几种方法:其一是用一电位器接在RT与地之间,而将滑动触头接在SPEEDSET。若用微处理器控制5脚,则可用RT作数模转换器(DAC)输入基准。RT电压应经缓冲器接外部电路。经跨导误差放大器,速度指令与比SPEEDFB(18脚)低0?7V的传感速度相比较。速度误差放大器的输出端是SPEEDCOMP(3脚),它被箝位在8.2~2.2V之间。8?2V信号与全PWM占空比相对应,而2?2V则对应0%占空比。速度环路补偿元件接该脚,见图13。可用下式来计算补偿元件:
CSC2=![]()
RSC=![]()
CSC1=10×CSC2
式中:freq是速度环路的带宽(Hz)。
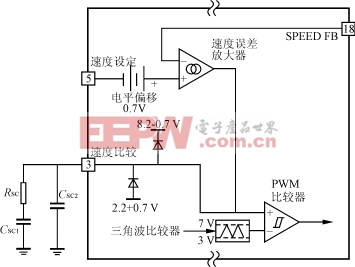
图13 PWM振 荡 器 电 路
图13中3脚电压与三角波振荡器比较,产生一PWM占空比。PWM振荡器产生一个3~7V的三角波函数,而三角波振荡器频率由RT(6脚)的接地电阻设定。RT可由图14曲线来选择。来自速度控制环的PWM占空比,选通逐个脉冲式电流限制电路,以控制输出驱动器LA、LB、LC。
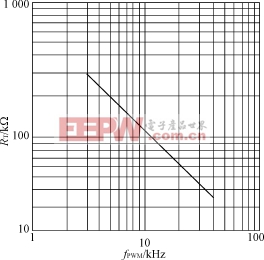
图 14 RT与 PWM频 率 的 相 应 关 系 曲 线
2.17 惯性跟踪
当CVCO(20脚)被拉低到1?5V时,6路输出驱动器均关断。惯性跟踪COAST功能切断所有的电源使电机随惯性至停止。20脚的惯性跟踪功能见图15,它可由一只接地开关或由图15中20脚的接地的开路集电极接地的开关管来驱动。
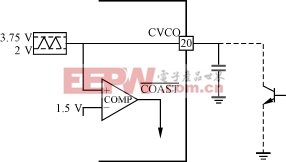
图 15 惯 性 跟 踪 控 制
2.18 欠压保护
欠压保护用于保护低VCC状况下的三相功率级。欠压保护是在 VCC=9.2V或更低时被启动。欠压保护也关断全部输出驱动器LA、LB、LC和HA、HB、HC。启动过电压的比较器具有500mV的滞后。
2.19 输出驱动器到三相桥功率级的接口电路
大多数灵活的电路结构,是采用高边驱动器来控制N沟道MOSFET或IGBT,它允许的应用范围是12~170V。
3 的典型应用电路
图16给出了典型应用中的ML4435及所有支持电路,图17则给出了采用IR公司的IR2118作高边驱动器的功率级电路和高压MOSFET。
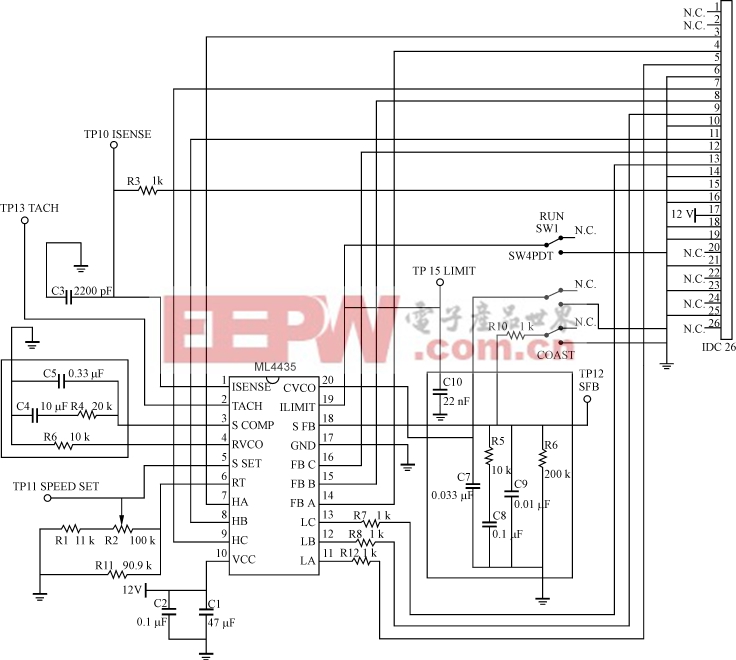
图16 ML4435的典型外围应用电路(原图,未做标准化处理)
图17 ML4435的外部功率级电路(原图,未做标准化处理)

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理








评论