基于LIN总线的汽车分级制网络结构

处于睡眠状态的LIN网络中的任何一个节点都可以请求唤醒总线,总线上的所有节点在接收到唤醒请求后应脱离睡眠状态并为接收总线命令做好准备。主机节点接收到唤醒请求后也被唤醒,并在从机节点准备好之后发送帧头,寻找唤醒原因。
3.4错误检测和处理
LIN规范定义了六种不同类型的报文错误:位错误、校验和错误、标识符错误、从机不响应错误、总线不活动错误和同步场不一致错误。主机节点和从机节点分别检测这六种错误中的若干种。
4.LIN应用设计
LIN是一种低速串行总线,其提出是针对汽车应用的,主要用于汽车电子控制系统,实现智能传感器、执行器等的连接。LIN定位于汽车上的下层局部网络。由CAN构成汽
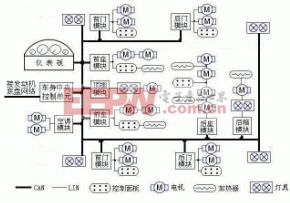
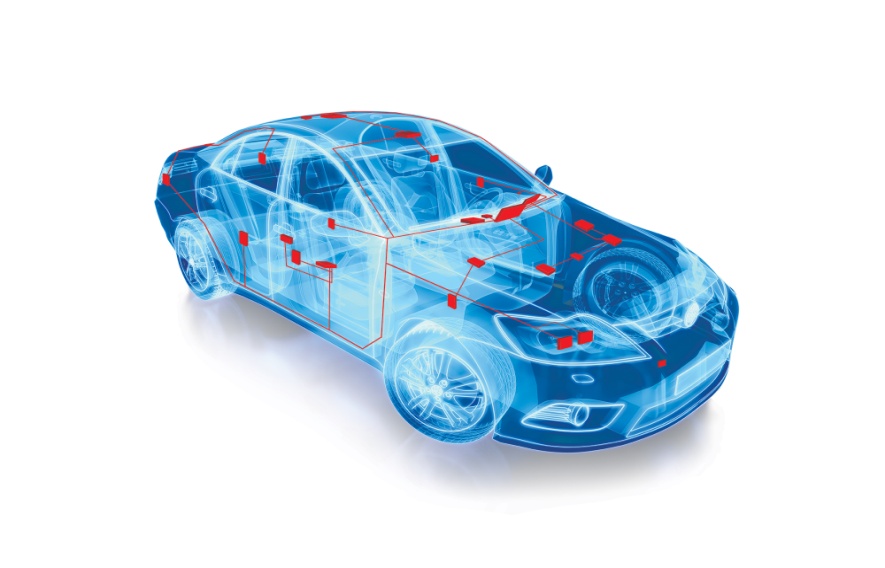
图4基于CAN/LIN的分级制汽车网络
车的上层主干网络,而在不需要CAN的高速与多功能性的场合则由LIN来构成下层局部网络,实现分级制网络结构,以达到合理分配利用网络资源、提高线路布置的方便灵活性、降低成本的目的。典型的基于CAN-LIN总线的分级制汽车车身网络如图4所示。
现以车门LIN网络为例介绍LIN总线设计的一般方法。
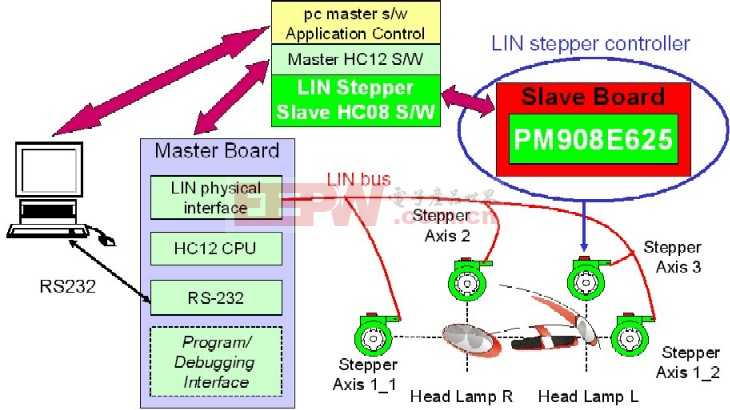
车门控制LIN网络的结构及其在车门上的布置如图5所示,该网络由主机节点、后视镜从机节点、摇窗机从机节点、门锁从机节点构成。
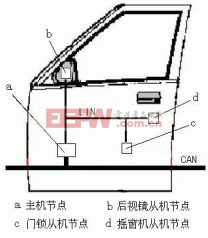
图5车门控制LIN网络
主机节点采集本地各控制开关的状态并接受CAN总线上的远程信息,据此产生控制指令,并将指令转换为LIN报文帧通过LIN网络发送给相应从机节点,从机节点接收到与自己相关的报文帧后对报文帧进行拆封、解读,然后根据获得的指令控制相应的执行器动作,从而实现对车门各部件的控制。同时,在需要时从机节点分别将其控制部件所处状态反馈给主机节点,主机节点再将该状态信息通过指示灯或喇叭提供给驾驶员或通过CAN总线发送给其他控制单元。主机节点也作为本LIN网络与上层CAN网络连接的网关。



评论