基于Wi-Fi的RFID定位方案探讨

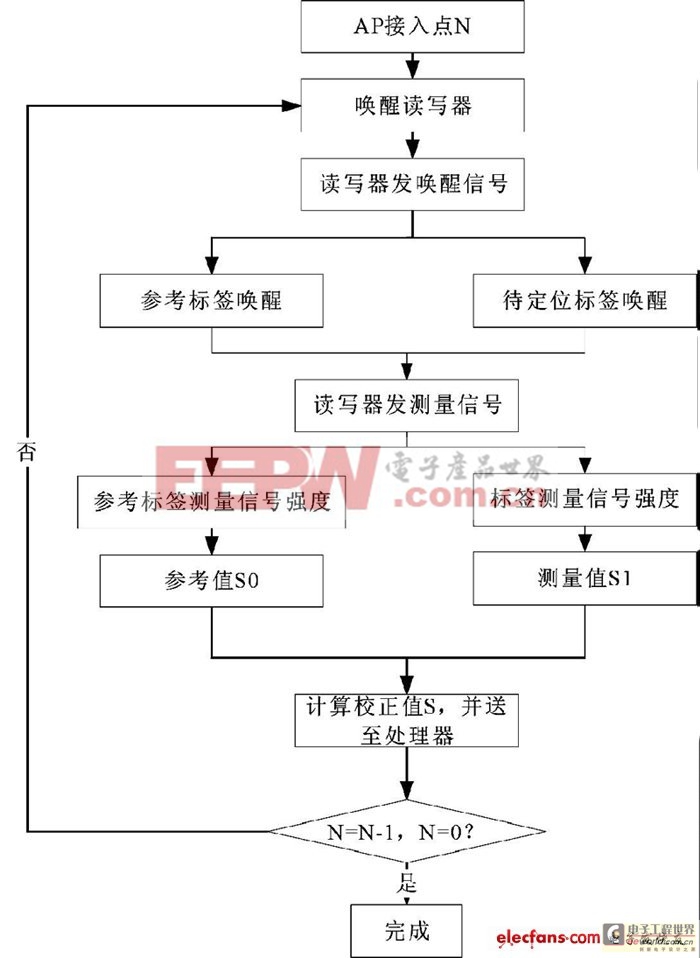
图2 基于信号强度的定位算法框图
基于信号强度的定位算法是用一个位置已知的参考标签与待定位Wi-Fi终端的标签接收同一个AP接入点的定位信号。参考标签所测得的位置与该点已知值进行比较后,获得读写器的定位数据的校正值,然后及时将此校正值发送给待定位的标签,修正标签所测得的实时位置信息S,并将此信息上传给读写器。在此过程中始终保持只有一个读写器工作,其余的读写器处于休眠状态,当一个读写器完成位置信息采集后,再由其他读写器完成同样的过程,这种定位方式下至少需要进行3次位置信息的采集。假设信号强度公式与读写器和标签之间的距离有关,则简单信号传播模型可用式(1)表示:
P(r )= (P )-10alog(r/0r)(1)
式中, P(r)为标签接收到的信号功率; r为标签与读写器的距离; r0 为相对于读卡器的参考距离; P(r)0 为该参考点的信号功率, 参数a 为路径损耗随着距离r 的增加而增加的速率。需要指出的是,通过该模型计算出的某个位置信号强度往往被估计得过高,实用性不大,比较实用的信号强度模型在文献[6~7]中有比较详细的介绍。
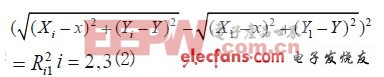
采用到达时间差(TDOA)算法是通过测量不同读卡器接收到同一标签的定位信号的时间差,并由此计算出标签到不同读写器的距离差。标签到任何两个读写器的距离差D为定值,标签必定位于两个读写器为焦点的双曲线上,当同时有N个读写器参与测距时(N≥3),由多个双曲线之间的交汇区域就是对标签位置的估计。TDOA只是测量各读写器接收到的同一标签定位信号的到达时间差,参加定位的各个读写器在时间上不要求严格同步。假定测量第i 个读写器和第j个读写器的到达时间分别为 TAi 和TAj ,那么信号到达第i 个和第j 个读写器的时间差就是 TAji = TAi -TAj , 它们的距离差Rji = C*TAji 。则标签坐标与读写器坐标存在如下关系:
解上述方程组, 利用基于信号强度定位算法算出的坐标值及一些先验知识(如室内半径)从其两个解中分辨出Wi-Fi终端的具体位置。
2 。 2 基于位置距离和角度的定位方案
文献[5]中,P.Munishwar等人提出了一种基于RFID的机器人定位方案,我们在此工作基础上提出了一种可以运用在Wi-Fi系统中的终端定位方案。该方案与基于信号强度的定位方案的不同在于引入了方向角的计算,通过距离和角度信息来实现Wi-Fi终端的定位。在Wi-Fi系统中需要设置了一个或多个传感器,用来跟踪待定位终端的运动,这些传感器可以通过串行接口进行查询,并返回自上次查询之后终端的运动距离和角度信息。
内置在Wi-Fi终端内的RFID标签允许待定位终端确定它的绝对位置(x,y),而位置的不确定性等于RFID读写器的最大标签感知半径。
系统定期运行算法一次(比如50ms),来获取和处理传感器和RFID读写器的数据。
通过RFID技术定期的重新校准终端位置和角度数据,每次定位算法运行时,它读取







评论