超声波传感器 - 应用原理和选型时需要关注的参数

人耳一般能够听到的声音频率范围是20Hz ~20KHz,超声波是一种频率高于人类听觉范围的机械波,其频率超过20KHz。与可听声波类似,超声波在各种介质中(非真空环境)通过机械振动传播。空气中超声波的传播速度约是343m/s(20°C 时),在水中的传播速度约为1500m/s。
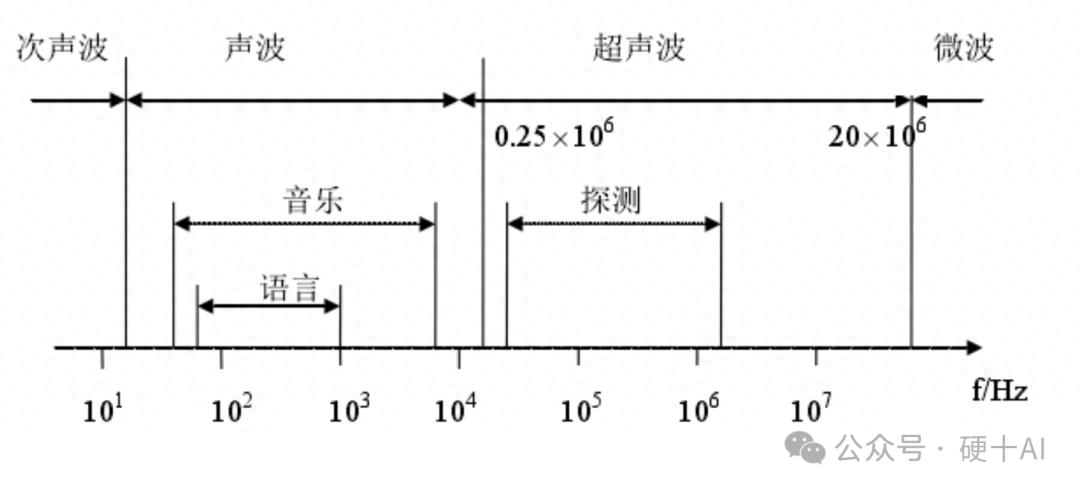
超声波因均有频率高、波长短、穿透性强的特性,被用于需要高精度、非破坏性的探测和成像等场合,应用的领域包括。
测距和定位: 如超声波传感器,用于测量距离和检测障碍物。
医疗成像: 超声波用于医学超声成像,如超声波检查、胎儿监测等医学成像应用,通过利用不同组织反射回的超声波来生成图像。
无损检测: 超声波可用于检测金属、混凝土等材料的内部缺陷或裂缝。
动物导航 : 蝙蝠和海豚等动物, 通过发送和 接收 超声波来导航和猎食。
2、机器人上应用的超声波传感器是什么?
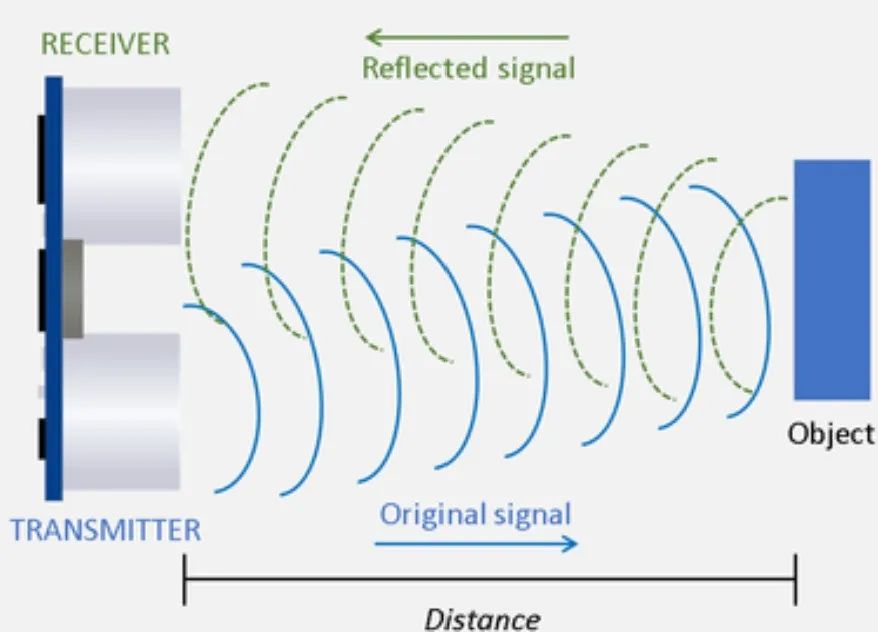
机器人上应用的超声波传感器是一种使用超声波来测量距离或检测物体的设备。它通过发射超声波脉冲,然后接收由目标物体反射回来的回波信号来工作。根据声波从发射到接收到反射波所需的时间,超声波传感器能够计算出物体与传感器之间的距离。
(1)超声波传感器的主要组成部分包括

发射器: 产生超声波,通常是一个压电晶体或电磁换能器,它能将电能转换成声能。
接收器: 检测从物体反射回来的超声波, 它将声能转换回电能。
测量计算装置: 利用 传感器系统记录超声波发射出去到接收回来的时间差,并通过时间差来推算距离。
(2)超声波传感器的工作流程
发射超声波:传感器中的发射器发出一定频率的超声波(通常是40kHz左右)。
波在空气中传播:超声波在空气中以音速传播(约343m/s,20°C时)。
距离的计算公式
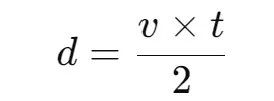
以在空气介质中传播为例,v是343m/s,t是发射到接收的时间,这个时间包含了往返时间,除以2才能得到单程距离。
3、超声波传感器的用途和优缺点是什么?
超声波传感器在距离测量、流体位测量、物体检测、汽车倒车辅助系统、机器人导航等领域有着广泛的应用。超声波传感器这种非接触式测距的方案性价比高,主要的优点包括
不受颜色和透明度影响:不像红外/视觉传感器,超声波不受目标颜色、亮度、透明度影响。玻璃、黑色表面也能有效反射超声波。
抗环境光干扰能力强:对光照不敏感,室内室外强光或黑暗环境均可稳定工作。
安全、无辐射:超声波对人体无害,没有电磁干扰问题。
安装灵活:模块小巧,可方便地布置在机器人各个方向。
超声波传感器的缺点是 对软质材料(如织物)或不规则表面的检测效果不佳,精度有限, 有效测量范围有限。
4、超声波硬件选型时需要关注的范畴?
(1)如何选择合适的超声波传感器
测量距离: 不同的超声波传感器具有不同的测量距离范围,从几厘米到几十米甚至更远。如果是短距离测量,例如机器人在狭窄空间内的避障,选择测量范围较小的传感器即可;如果是用于长距离检测,如大型设备的远程监控,就需要选择测量范围较大的型号。
测量精度: 如果是对精度要求不高的场景,如简单的障碍物检测,精度稍低的传感器可能就可以满足需求; 但如果是用于精密加工或高精度定位的机器人,就需要选择精度高的超声波传感器。
工作环境: 满足工作环境的问题、湿度要求。 如果工作环境中存在其他超声波设备、气动阀、喷气嘴等可能产生超声波噪声的设备,需要选择抗干扰能力强或能够避免干扰的传感器,或者采取相应的屏蔽措施。
尺寸和安装方式: 对于 空间有限的机器人应用场景,需要选择小巧紧凑的传感器; 有些场景可能需要特殊的安装方式,如嵌入式安装、法兰安装等,要确保传感器能够方便地安装和固定。
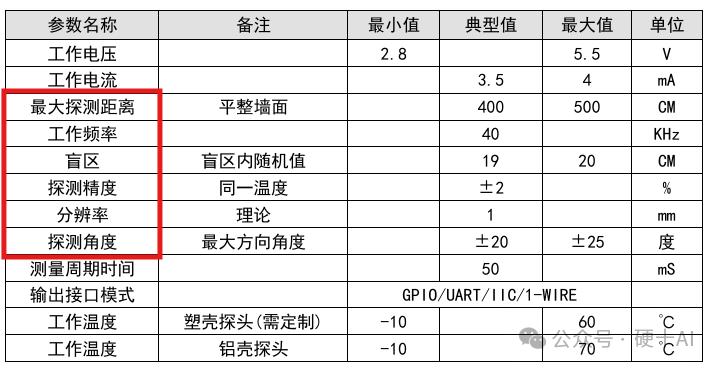
(2)超声波选型时需要关注的硬件参数 超声波传感器在选型和应用时,需要关注一系列关键硬件参数,这些参数直接影响其测量精度、使用场景、可靠性和兼容性。
测距范围(Min/Max Range):最小和最大可测距离(如2cm~400cm)
测距盲区(Blind Zone):传感器无法测距的最小距离区间(通常为2cm左右)。
测距精度(Accuracy):实际测距与真实距离的最大误差(如±2%)
分辨率(Resolution):能够分辨的最小距离变化(如0.1cm)
发射角度/波束角(Beam Angle):超声波锥形发射的角度范围,常见为15°~30°
频率(工作频率):发射器的超声波频率,常见为 40kHz
说明:参考以下超声波的芯片手册
5、超声波选型为什么要关注“探测角度”这个参数?
“探测角度”也叫“波束角”,在工程应用中这是超声波传感器选型的一个很关键参数。
(1) 探测角度的原理:由超声波的发射特性决定
超声波传感器内部的换能器(Transducer)在发射声波时,不会像激光那样形成一条直线束,而是以一定角度向前锥形扩散,这就是所谓的探测角度或波束角,它的形成和频率、换能器直径、探头结构设计都相关。
超声波传感器发出的声波信号会向左右各扩展一个角度,形成一个锥形区域,在这个角度范围内遇到物体,就有可能反射回波并被接收。
(2)探测角度对应用的影响:探测角度大,可以增大探测范围,但容易受旁边物体干扰,定位不精确,并且多个模块工作时可能“听到”彼此的回声,造成串扰。工程应用选型时
通用超声波传感器:波束角约15°~30°,用于前方宽区域检测。
工业窄波束传感器:波束角 10°以内,适合高精度避障或液位测量。
你可以想象站在一个黑暗的房间里打手电筒
聚光灯=小波束角,照得远但视野窄(高精度、定向探测)
泛光灯=大波束角,视野广但照得近(范围广、适合泛探测)
综上,“探测角度”这个参数的原因是超声波天然具有扩散性,无法像激光一样严格定向,波束角越小,测距更稳定;越大则适合大范围检测,但要关注机器人超声波周围的结构件对超声波的影响。











评论