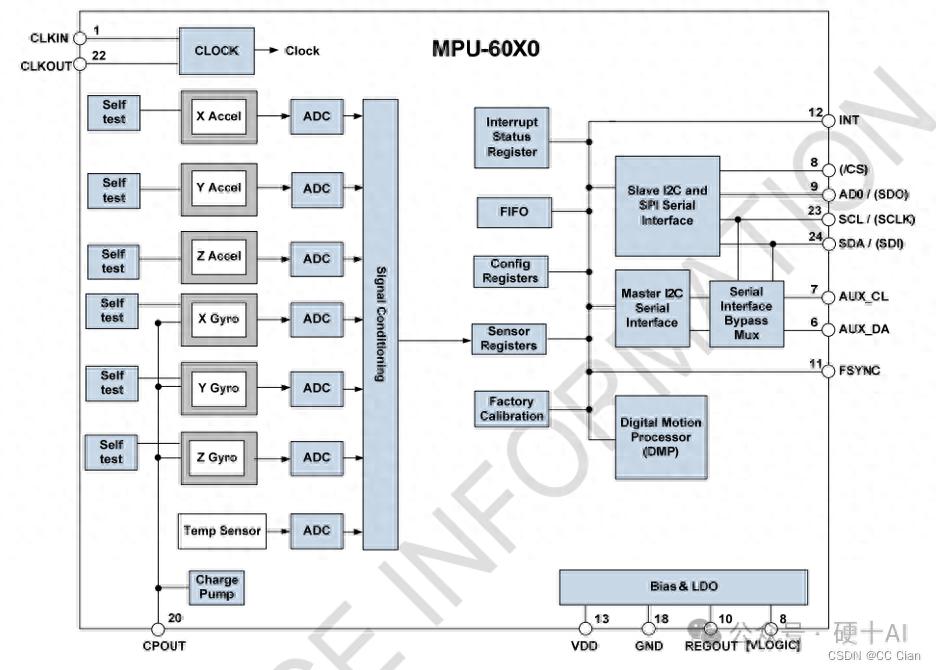
IMU - 核心组件工作原理和规格参数

IMU 主要由加速度计和陀螺仪组成,其工作原理基于牛顿力学和陀螺进动原理,IMU获取导数据后进行数据融合
(1)加速度计的工作原理:基于牛顿第二定律
加速度计通过测量物体在三个正交方向(通常称为 X、Y、Z 轴)上的加速度来感知物体的运动状态。它基于牛顿第二定律,即力等于质量乘以加速度(F = ma)。当物体在某个方向上有加速度时,加速度计内部的质量块会受到相应的惯性力,通过测量这个惯性力引起的位移或应变,计算出加速度的大小和方向。
(2)陀螺仪的工作原理:基于陀螺进动原理
陀螺仪绕其输入轴快速旋转时,会具有保持其旋转轴方向不变的特性。如果外部施加一个力矩试图改变其旋转轴的方向,陀螺仪会产生一个进动运动,进动的角速度与施加的力矩成正比。通过测量这个进动运动的角速度,就可以得到物体绕该轴的旋转角。
(3)数据融合
IMU的数据融合通常使用滤波算法,如卡尔曼滤波(Kalman Filter)或互补滤波(Complementary Filter),以提高姿态估计的准确性和稳定性,这些算法通过结合加速度计、陀螺仪和磁力计的数据,来消除各自的缺点,提供更精确的姿态信息。
总结,IMU 通过加速度计测量线性加速度,通过陀螺仪测量角速度,然后通过积分运算来推算物体的姿态(如俯仰角、滚转角、偏航角)和位置变化。由于积分运算会导致误差累积,所以 IMU 的测量结果在长时间内会存在漂移现象。为了提高测量的准确性和稳定性,通常会采用多种技术和算法进行校准、滤波和融合,例如与其他传感器(如 GPS、磁力计等)的数据进行融合,以补偿 IMU 的误差和漂移。
2、IMU的核心规格参数有哪些?
IMU的参数可以在芯片手册里获得,这里列举一些常用的参数,这些参数说明了IMU的性能范围,可以为选型提供参考。
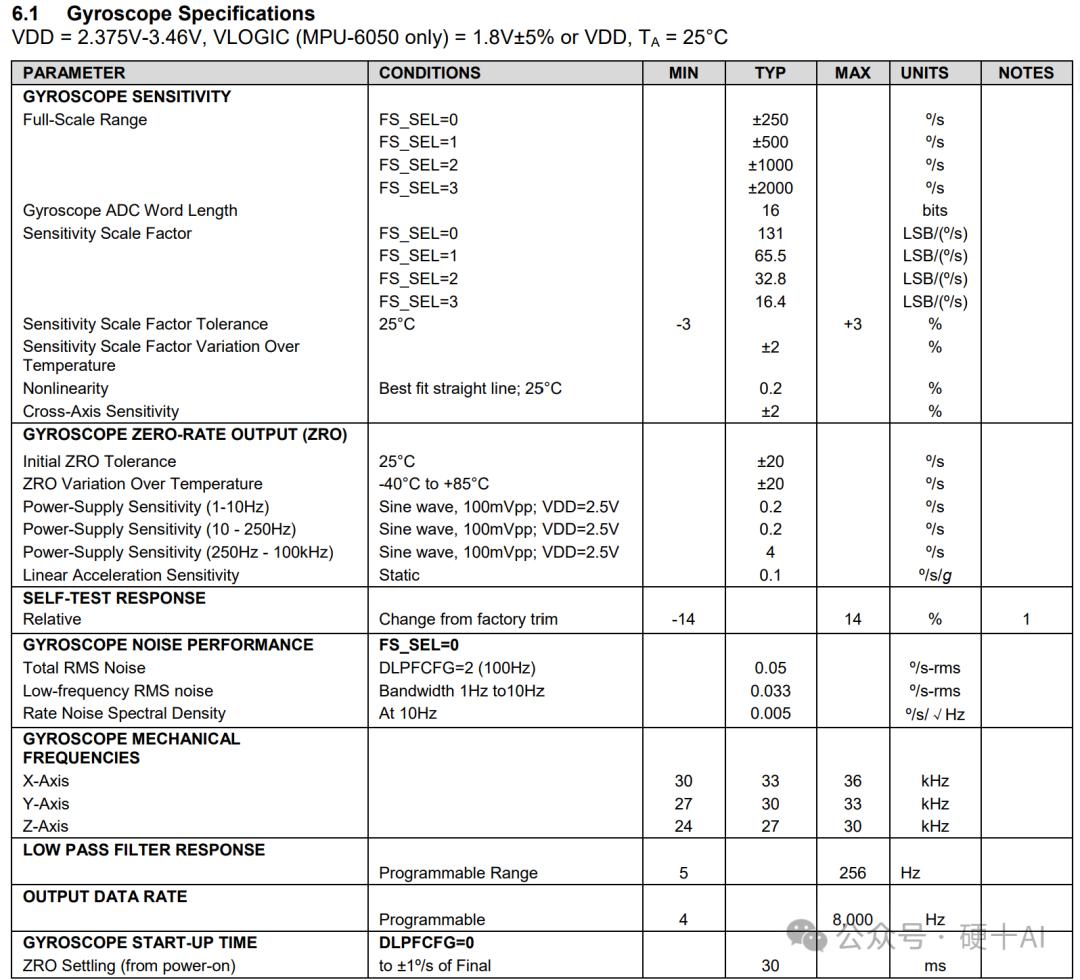
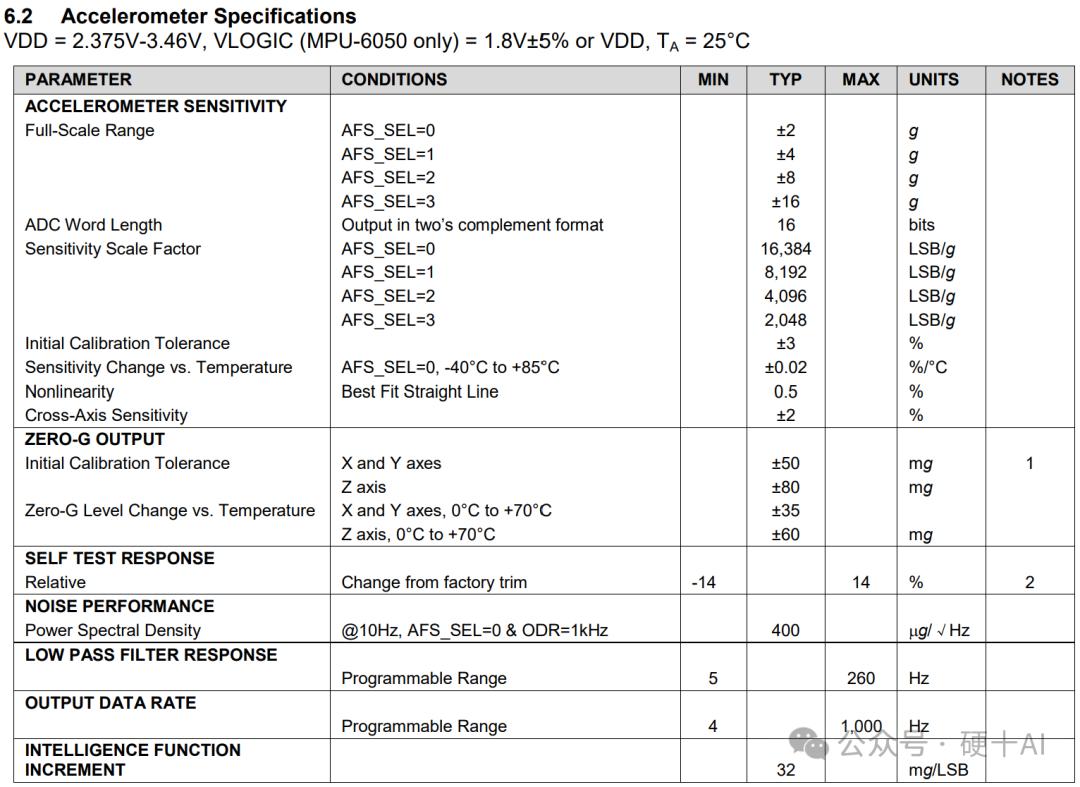
量程(Full-scale range):以加速度计为例,在工业机械振动监测中,可能需要测量高达 ±50g 甚至更高加速度的冲击,就必须选择量程匹配的IMU;而用于可穿戴设备监测人体日常活动时,±2g~±8g 的量程便足以满足需求。陀螺仪的量程同样重要,高速旋转机械的运动监测,需高量程陀螺仪(±3000°/s);而 AR/VR 设备中,±1000°/s - ±2000°/s 的量程就能精准捕捉用户头部转动。
灵敏度(sensitivity):代表最大角速度或加速度取样精度,加速度计-高精度场景(如测绘无人机)需达到μg级;消费级产品通常为mg ;陀螺仪 - 工业机器人在0.1°/s。
噪声系数(noise):代表输出噪声与带宽的关系,直观地说就是影响对真实信号的辨识程度。加速度计的μg/√Hz与陀螺仪mdps/√Hz 的工程指标。
输出数据速率(ODR):ODR指IMU每秒输出数据的次数,需匹配系统控制周期。在快速变化的运动场景中,高ODR 至关重要,过高的 ODR 会增加数据处理负担和功耗,需根据实际应用需求平衡选择,常见的 ODR 范围从几十Hz到数千Hz 不等,高速场景比如自动驾驶紧急避障(ODR≥1000 Hz)、竞技体育动作捕捉(ODR≥500 Hz)。
零偏(zero-rate offset/level):IMU中尤其针对角速度计的一个重要参数,它代表了角速度计/加速计在静止时仍然输出的大小,是后续IMU校准中重点讨论的参数。我们希望它越小越好,以避免积分时带来的累计误差。通常目前IMU给出的典型值都是在1deg/s以上。
零偏不稳定性:主要针对角速度计的参数,代表零偏在较长时间下的随机游走。
温度漂移(zero-rate offset change over temperature):零偏随温度改变的大小,同样是角速度计的重要参数,越小代表IMU的零偏随温度影响越小。
敏感度温漂(sensitivity change over temperature/sensitivity temperature drift):敏感度随温度的改变,通常用百分比或者FS/K(满刻度每度)。
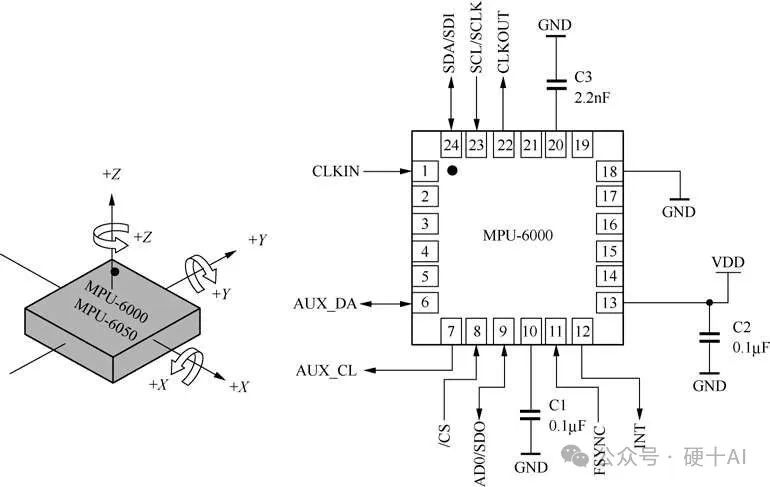
附:参考MPU6050芯片手册
3、IMU如何根据应用场景选择合适的器件?
(1)不同精度/成本的IMU可以应用在不同场景中
低精度IMU:应用在普通的消费级电子产品中,这种低精度的IMU十分廉价,普遍应用于手机、运动手表中,常用于记录行走的步数。
中精度IMU:应用于无人驾驶中,价格从几百块到几万块不等,取决于此无人驾驶汽车对定位精度的要求。
高精度IMU:应用于导弹或航天飞机,以导弹为例,从导弹发射到击中目标,宇航级的IMU可以达到极高精度的推算,误差甚至可以小于一米。
除了精度和成本等特性外,IMU还有两个十分关键的特性,第一是更新频率高,第二是短时间内的推算精度高。
(2)器件厂家
TDK InvenSense:MEMS加速度计,角速度计,磁力计,六轴/九轴厂商,有广泛使用的IMU MPU6050,也有更贵的高性能的ICM系列。
ST:MEMS加速度计,角速度计以及六轴厂商,主要为智能手机市场提供IMU,例如有LSM6DS3TR。
Bosch:MEMS加速度计,角速度计,磁力计,六轴/九轴厂商,主要为机器人和无人机市场提供IMU,六轴传感器的有BMI系列,成本
QST(上海矽睿):磁力计,加速度计以及六轴的国产厂商,有QMI8658/QMI8610等六轴传感器。











评论