DIY传感器让机器人双手和双脚都能感觉到

由于缺乏多功能、可访问且易于定制的触觉传感器,导致通用机器人作中出现了碎片化的、特定于传感器的解决方案
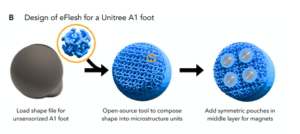
纽约大学的研究人员在 E-flesh 项目中合作,正在弥合无力感知和无传感器机器人应用与有感知的抓手、手和脚之间的差距。有趣的是,您可以轻松制作自己的传感器:您需要一台业余 3D 打印机、小型现成的磁铁和磁力计电路板。
来自 E-flesh 网站 :
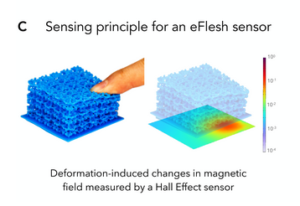
“该传感器由平铺、参数化的切割单元微结构构成,允许调整传感器的几何形状和机械响应。为了支持广泛的可访问性,我们提供了一个开源设计工具,可将简单的凸面 OBJ/STL 文件转换为可 3D 打印的 STL,以便制造。这种模块化设计框架使用户能够为机器人手、夹爪、四足足等创建特定于应用的传感器,并轻松调整灵敏度以满足不同任务的需求。
我们的传感器表征实验证明了 eFlesh 的精度:接触定位精度为 0.5 mm,沿 z 轴的力预测误差为 0.27 N,沿 x/y 平面的力预测误差为 0.12 N。我们还提出了一个基于学习的滑动检测模型,该模型以 95% 的准确率推广到看不见的物体,以及视觉触觉控制策略,该策略将作性能提高了 40%,在仅视觉基线上提高了 40%——在插头插入和信用卡刷卡等许多精确任务中实现了 90% 的成功率,这些任务需要亚毫米级的精度才能成功完成。所有设计文件、代码、经过训练的模型和 CAD 到 eFlesh STL 转换工具都是公开提供的,以促进可访问性并鼓励广泛采用。












评论